

血管介入治疗以创伤小、反应轻、恢复快、靶向性强等特点,已成为治疗心脑血管疾病的首选治疗方式[1-2]。但是,传统介入手术存在较为明显的弊端:医生长期处于X光辐射下,会对其身体造成伤害,且长时间高负荷进行手术操作易导致手术精度下降[3-4];手术要求医生具有丰富经验和高水平医术,医生学习和培训周期较长[5-6],以上弊端极大限制了血管介入手术的应用。针对以上问题,引入机器人技术辅助医生进行血管介入手术,医生通过操作主端机器人远程控制从端机器人递送导丝等介入器械至病灶处以完成手术,避免了辐射伤害、手术精度下降等问题,同时缩短手术时间以减少患者辐射暴露[7-8]。
国外研究机构已推出了商业化产品,如Magellan[9]、Amigo[10]、Corpath GRX[11]、Da Vinci[12]等,其中Corpath GRX采用成对摩擦轮递送导丝,独立机构操作导丝旋转,但该机器人无法实现同时递送和旋捻导丝。在国内,Bian等[13]研发的机器人系统采用一组摩擦轮作为仿生手指,通过主被动摩擦轮绕其自身轴线转动和沿其轴线上下移动实现导丝的递送和旋捻。王洪波等[14]研发的机器人系统采用夹持爪夹紧导丝,通过旋捻机构带动夹持爪旋转实现导丝旋转,使用滚珠丝杠结构带动夹持旋捻机构前后运动实现导丝递送。Wang等[15-16]研发的血管介入系统采用开放式结构设计,导轨上固定4个机械手,通过钢丝牵引实现机械手轴向移动,每个机械手可单独完成夹持、旋转运动,实现了多机械手协同操作。
目前,血管介入手术机器人技术发展迅速,可操作导丝完成递送、旋捻动作,但存在以下缺陷:一是其体积较大,行程有限,需要多次往复操作调整;二是无法同时实现旋转和递送导丝操作;三是缺乏导丝受力信息,无法准确评估手术情况;四是从端机器人难以实现无菌要求;五是可操作介入器械型号单一。
针对以上问题,基于医生手部操作特点,根据导丝运动状态设计了一款创新的血管介入手术机器人从端机构,采用模块化设计,实现了非无菌/无菌操作区域的隔离;同时,开放式结构设计便于医生取放导丝,避免闭合机构造成的手术复杂性问题。执行机构采用差速行星轮系传动,解耦推送、旋捻间的相对运动关系,使导丝在边旋转边递送时更加平稳;递送机构采用摩擦轮模拟医生手部递送导丝动作,可实现无距离限制的连续送丝;旋捻机构使用相互啮合的齿轮,可实现无角度限制的连续旋捻;夹持机构采用螺杆传动与齿轮齿条结合的形式,可实现两摩擦轮开合距离及夹持力的调整,以夹持不同规格的导丝/微导管。
本文主要对上述介入手术机器人从端机构的工作原理进行介绍,并对其各部分结构进行设计。对该机器人的推送、旋捻、夹持机构进行运动学计算分析。利用仿真软件对其进行运动学仿真,验证了运动学计算的正确性和结构设计的合理性,并对从端机器人递送、旋捻机构进行试验研究。
1 从端机器人结构设计
1.1 从端机构设计要求
1) 无菌要求:血管介入手术机器人属于III类医疗器械,要求从端机构与介入人体的导丝直接接触部分完全无菌,能够进行反复灭菌消杀,而从端驱动部分无法进行灭菌消杀,所以需要复杂的传动及快拆结构将驱动部分的动力转化为从端执行机构的运动。
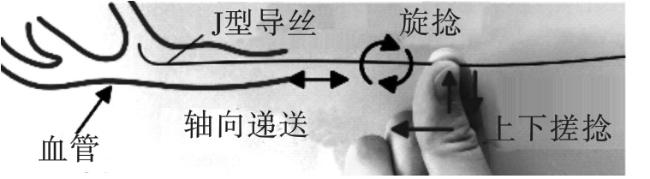
2) 自由度:图1为导丝在血管中的运动示意图,对导丝执行的主要操作有夹持/松开、轴向推进/后撤和旋转3种动作,故要求从端机构能够操作介入器械实现3自由度运动。
3) 轴向/周向运动行程:导丝递送行程不低于65 cm,且周向需正反连续旋转,故轴向运动行程为(-∞,+∞),周向运动行程为(-∞,+∞)。
4) 运动精度:考虑手术安全性,要求从端轴向推进速度为0~10 mm/s,定位精度小于1 mm,重复定位精度为±0.8 mm,旋捻速度为0~3 r/s。
5) 尺寸:要求从端机构小巧,执行机构整体尺寸不超过60 mm×100 mm(直径×长度)。
6) 器械拆卸便捷:介入器械为细长非刚性材料,要求机构闭合/张开时便于介入器械安装。
综上,从端机构设计要求总结如下:
1) 满足无菌要求;
2) 可操作导丝实现3自由度运动;
3) 轴向运动与周向旋捻行程均为(-∞,+∞);
4) 轴向推进速度为0~10 mm/s,定位精度小于1 mm,重复定位精度为±0.8 mm;
5) 旋捻速度为0 ~ 3 r/s;
6) 机构拆装方便,便于导丝取放。
1.2 从端机构结构设计
1.2.1 从端机构设计方案
从端机构整体设计方案如图2a所示,采用模块化设计,将从端机构分解为执行机构(无菌耗材)、一次性无菌隔离组件和驱动端组件,通过设计特定一次性无菌隔离组件将执行机构和驱动端组件分隔开,以实现从端机构的无菌隔离。其中,执行机构是核心部件,能够模拟医生手部动作操作导丝实现夹持、推送、旋捻动作,利用扭簧卡扣和一字型对接花键实现驱动端/执行机构与一次性无菌套袋组件的快速安装与拆卸。
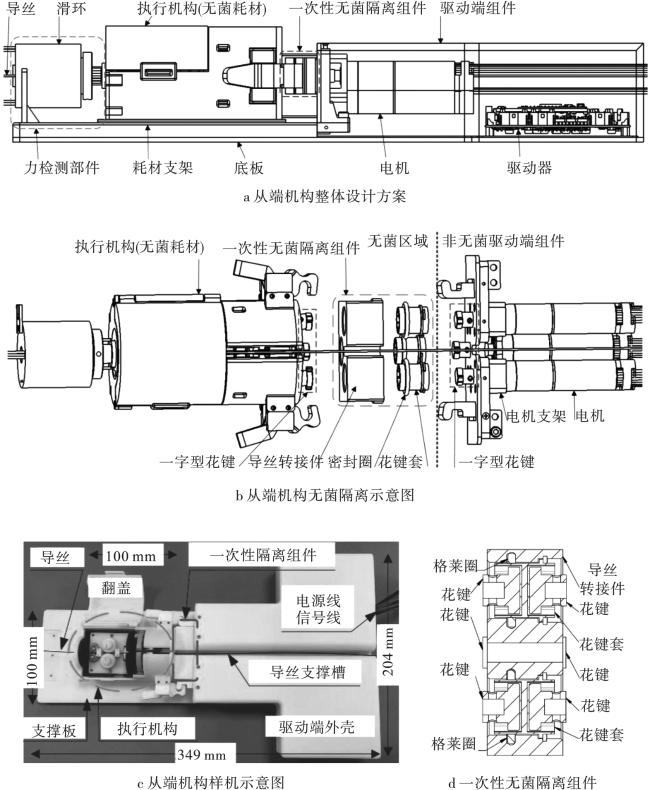
一次性无菌隔离组件如图2d所示,花键套采用中间隔断式设计,通过该隔板可将无菌花键和非无菌花键隔离;采用轴用格莱圈(密封圈)支撑并隔离花键套两侧。该组件的零部件为非金属材料,不含电子元件,可进行完全消毒灭菌操作,并在手术完成后作为耗材抛弃。
1.2.2 执行机构结构设计
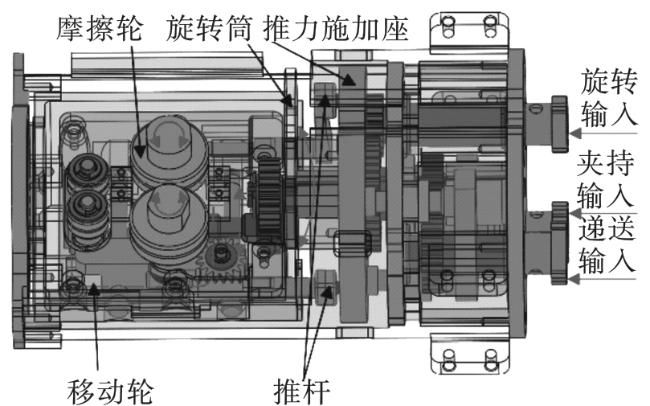
基于差速行星轮系,设计了如图3所示的从端机器人执行机构,该机构可以在电机驱动下实现对导丝/微导管的夹持、推送和旋捻操作。其中,递送机构采用摩擦轮设计,可以实现单次无距离限制推送导丝。旋捻机构由一对相互啮合的齿轮构成,可带动夹持机构整体旋转,以实现导丝的旋转。移动轮可沿箭头方向平动,夹持不同规格的导丝/微导管。
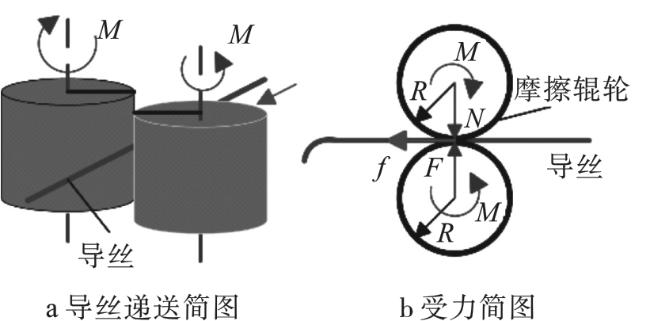
1) 递送机构设计。递送机构采用摩擦轮设计,利用两轮之间正压导丝产生的摩擦力实现导丝的进给和退回,导丝轴向递送原理图如图4所示。
由图3可知,当摩擦轮夹紧导丝后,推送电机将运动传递至一字型花键,通过一字型花键驱动齿轮系运动,将电机运动传递到摩擦轮轴,从而带动摩擦轮旋转,最终实现导丝轴向无距离限制的推送。递送机构使用伺服电机作为动力输入,带有1 024线增量式编码器,能够满足导丝远距离快速、精确推送的要求。
为便于取放导丝,采用开放式结构设计,对位于旋转中心的零件进行开缝处理。由于在介入手术中常用器械为0.035’导丝/0.014’导丝和1.9F-3F微导管,其直径尺寸小于1 mm,故开缝宽度为1 mm。
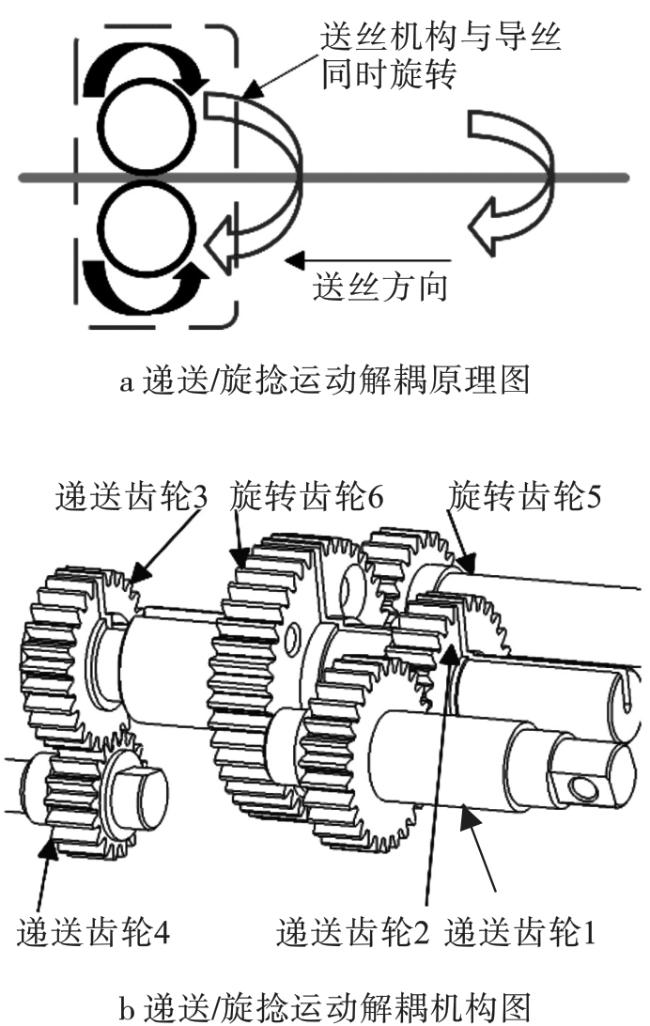
2) 旋捻机构设计。导丝旋捻机构是采用一对啮合齿轮带动夹持机构整体旋转的设计,可实现导丝绕自身轴线的旋转,结构简单紧凑、质量小,有利于整机轻量化设计。
采用差速行星齿轮系的传动方式(图5),解耦推送、旋转之间的相对运动关系,使送丝机构与导丝同时旋转,消除同时递送和旋转导丝时导丝与摩擦轮间的相对摩擦,实现导丝的同步递送与旋转,提高导丝递送运动的稳定性,实现更高的精度。
3) 夹持机构设计。夹持机构采用齿轮、齿条与螺杆机构结合的形式实现夹持装置的开合运动,夹持机构原理图如图6所示。
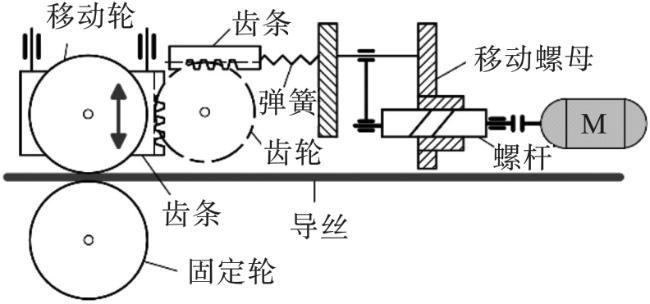
由图3可知,夹持机构的夹持轮置于旋转筒内,一摩擦轮为绕自身轴线旋转的固定轮,一摩擦轮为既能绕自身轴线旋转又可跟随带齿滑块平动的移动轮。移动轮平动可调节两轮间的距离,间距为0~2 mm,可满足夹持不同规格导丝/微导管的要求。该机构通过螺杆将输入的旋转运动转化为螺母圆盘的直线运动,螺母圆盘与推力施加座固连实现同步运动。推力施加座为齿条推杆提供推力,一齿轮双齿条结构将轴向运动转变为径向运动,带动移动轮径向平动以实现夹持机构的开合运动,从而实现对导丝的夹持、松开功能。
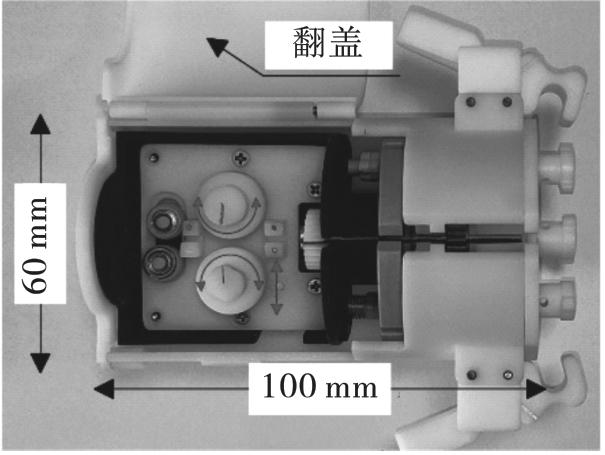
图7为执行机构物理样机示意图,该机构整体设计为无菌无源的执行机构,其内部仅有机械传动元件,可对其进行完全消毒灭菌。整体零部件均由非金属材料加工而成,成本较低,在手术完成后可将其作为一次性耗材抛弃。
2 从端机构运动学分析
2.1 递送/旋捻机构运动学分析
1)递送/旋捻机构独立运动分析。齿轮传动为标准中心距安装,根据传动比计算公式可得到递送机构传动比i 16。
式中:z为齿轮齿数;ω为角速度。
递送机构末端输出摩擦轮直径d 7=15 mm,可计算得到递送机构独立推送导丝时的推送速度v D。
由式(3) 可知,执行机构轴向推送导丝的速度与推送输入W 1成正比,为匀速运动,导丝轴向移动距离随时间呈线性变化。
旋捻机构的齿轮传动为标准中心距安装,其传动比为
若旋捻电机输入角速度为ω 7,则导丝旋捻角速度ω 8 = ω 7/i 78。
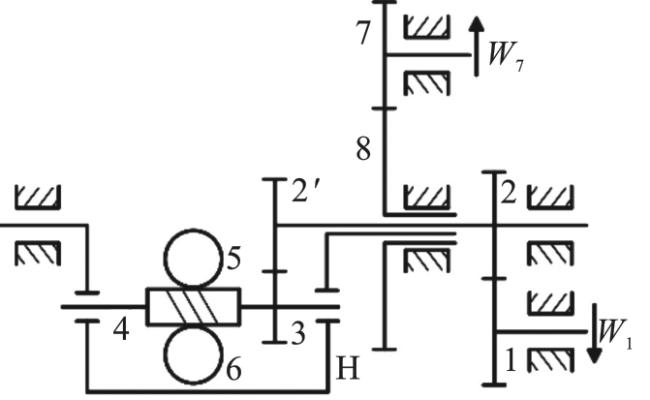
2)递送/旋捻复合运动分析。利用差速行星齿轮系将递送运动与旋转运动解耦,操作导丝的同时进行递送运动和旋转运动。当从端机构边旋转边推送导丝时,根据图8所示的齿轮系机构简图和差速行星轮系计算原理,可得
导丝旋转角速度由旋捻输入得到,递送摩擦轮角速度由旋捻输入和递送输入共同作用,计算得到边旋转边推送导丝时的摩擦轮角速度ω 6和旋转角速度ω 8。
2.2 夹持机构运动学分析
夹持机构主要包括旋转筒外螺杆传动和旋转筒内齿轮齿条传动两部分,其中,螺杆为单线螺纹,大小为M6,螺距p h=1 mm,螺母圆盘上传动螺母为M6,由式(8) 计算得到螺杆导程s=1 mm。
即螺杆旋转一圈,螺母圆盘轴向移动1 mm。由图7可知,两齿条运动方向垂直,速度大小相等,螺母圆盘轴向移动带动齿条运动,螺杆每旋转一圈,夹持机构开合处打开或闭合1 mm。
3 从端执行机构仿真分析
将执行机构导入仿真软件,选择运动应用模块,根据实际运动情况,在虚拟样机中添加材料、运动副、载荷等约束,仿真求解器选择RecurDyn模块,设置解算方案并仿真。
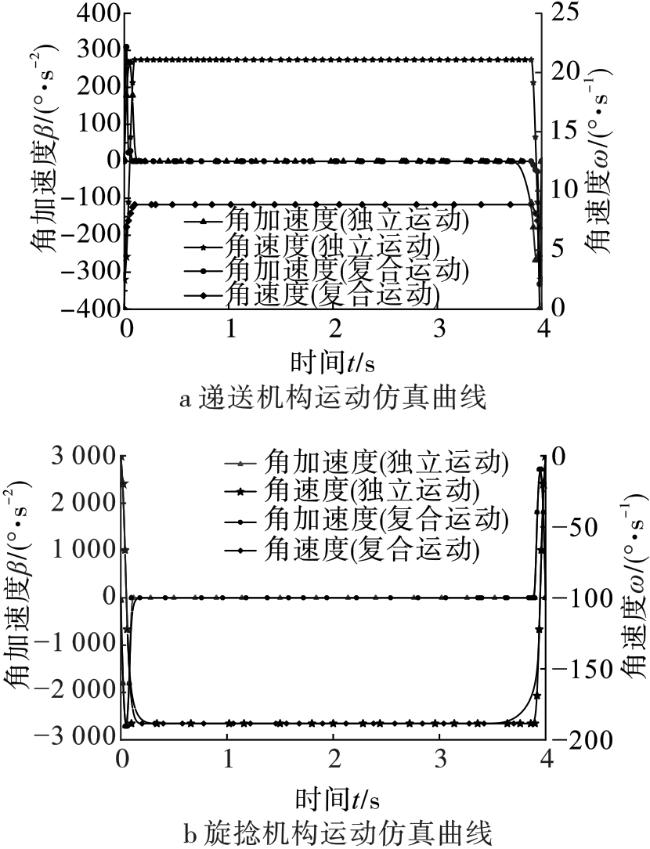
3) 递送/旋捻机构复合运动仿真:施加旋捻、递送输入,即先加速至1 r/s后匀速行驶,最后减速至0 r/s,转速大小、方向相同。图9中,复合运动曲线显示了机构边旋转边推送导丝时的摩擦轮角速度及旋转筒角速度信息:复合旋捻角速度与独立旋捻角速度一致。由式(7) 可知,递送摩擦轮角速度由旋捻输入和递送输入共同作用,仿真结果与式(7) 相符,验证了运动学计算的正确性和结构设计的合理性。
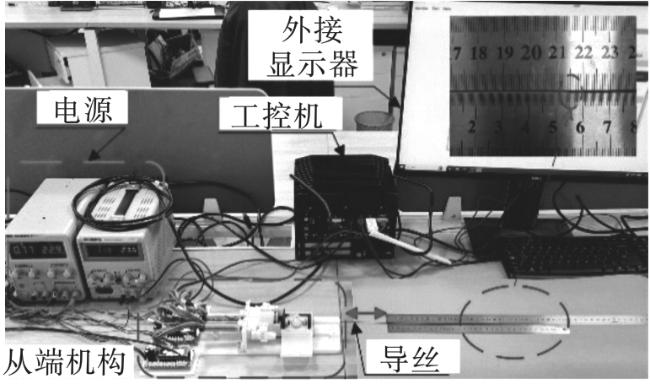
4 从端系统实验
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5 结论
1) 本文基于手术操作动作,提出了一种仿医生动作、操作简单、可实现无菌隔离的血管介入手术机器人从端机构,该机构能够模仿医生动作操作导丝/微导管实现夹持、递送、旋捻动作。本文对该机构进行详细的介绍,并对从端执行机构的递送机构、旋捻机构及夹持机构进行了运动学分析,建立其运动学方程,计算推导出该机构的递送速度及旋捻速度,证明了该机构运行平稳,符合导丝/微导管递送及旋捻设计要求。
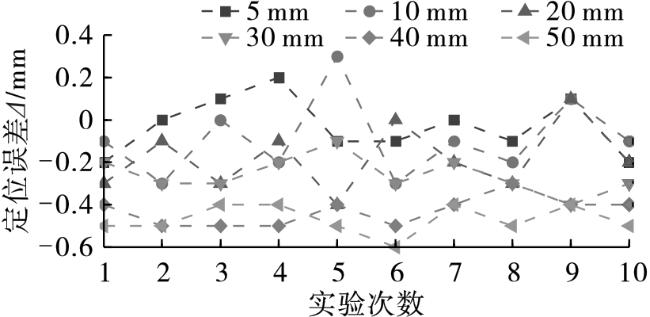
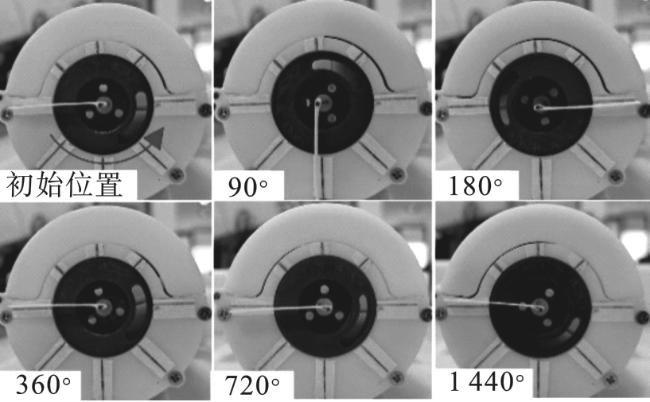
2) 对从端执行机构递送及旋捻机构进行运动学仿真,结果证明了其运动学计算分析的正确性和结构设计的合理性。对从端机器人系统进行了试验评估,结果表明该机器人系统递送机构可达到[-0.5 mm,0.5 mm]的递送定位误差,且旋捻机构可在较小误差内控制导丝实现指定角度的旋转,试验结果证明了从端机器人的可靠性,能够达到预期设计目标。因此,该从端机器人系统能够满足临床手术的需要。
3) 未来研究主要包括:设计主端操作机构,进行主从控制系统搭建及主从跟随试验,试验验证该机器人操作导丝运动的性能。基于试验结果对样机进行优化设计,提高机构运动性能;设计力检测机构,实现导丝实时受力检测,提高机器人辅助介入手术的安全性。