

1 小车行驶轨迹分析
1.1 打卡点位
太阳能小车打卡点位及坐标如表1所示。
表1 打卡点位及坐标 |
| 序号 | 特征点 | 坐标x/mm | 坐标y/mm |
|---|---|---|---|
| 1 | A | 5 588 | 713 |
| 2 | B | 4 463 | 375 |
| 3 | C | 2 925 | 825 |
| 4 | D | 2 175 | 1 500 |
| 5 | E | 375 | 788 |
| 6 | F | 600 | 2 550 |
| 7 | G | 375 | 2 738 |
| 8 | H | 900 | 3 938 |
| 9 | I | 1 725 | 5 250 |
| 10 | J | 3 188 | 5 625 |
1.2 拟合行驶曲线
小车转向轮的转弯半径R 0可以表示为
式中:K为行驶轨迹的曲率;φ(t)为x坐标与变量t之间的函数;ω(t)为坐标与变量t之间的函数。
B样条曲线在逼近特征多边形上具有更高的精度,克服了多项式曲线在解决此类问题上的不足,可以满足要求。m阶n次B样条曲线公式[9]为
式中: 为控制点数; 中,i为第i个m阶B样条函数。
B样条曲线连续方程为
由于该样条曲线具有4阶连续性,式(4) 可以表示为
可得其应满足以下条件
=
由于样条曲线通过起点和终点时,在6个控制点Pi 到Pi +5中,3个点Pi +1、Pi +2和Pi +3需重合并作为自身曲线初始点,且5个点Pi 、Pi +1、Pi +2、Pi +3和Pi +4共线,可知其需满足如下方程
将上述方程联立求解,并选择合适的起始点位和控制点,得到小车的初始运行轨迹。

2 小车结构设计
2.1 整体结构设计

2.2 传动机构
为了保证传动精度与平稳性,在设计传动机构时应该尽可能减少传动齿轮数量及传动级数。本文中小车传动机构齿轮采用两级传动,第一级传动为动力传动齿轮,第二级传动机构为减速机构,传动机构简图如图3所示。经过计算,小车打卡所有点位坐标行驶距离为13 150 mm。

传动机构的总传动比为
式中:z 1=107,z 2=12,z 3=218,z 4=44,可计算出 总=44。
大齿轮采用不锈钢、小齿轮采用黄铜材料,保证了齿轮的强度,同时对齿轮与左后轮进行简化设计,减少了小车传动机构的零部件数量,同时减小了小车的质量。
2.3 微调机构

3 凸轮的优化设计
3.1 凸轮廓线的设计
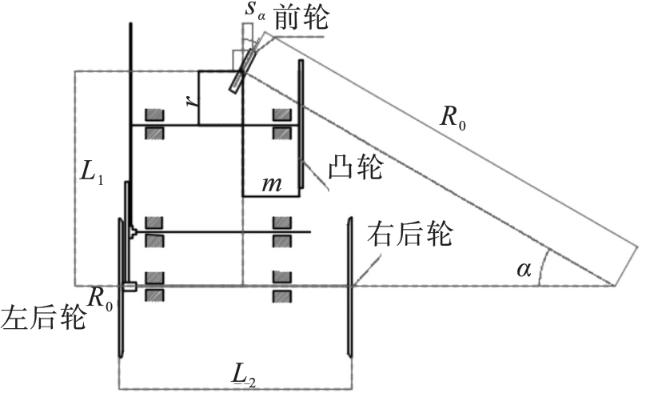
其中:L 1为前后两轮轴的距离;L 2为2个后轮外表面之间的距离;α为前轮转动角度;R 0为转弯半径;r为凸轮基准直径;m为凸轮内侧与前轮轴之间垂直方向的距离。凸轮廓线的具体计算方法如下:
小车凸轮的半径是根据凸轮轮廓表面与推杆直接接触而导致的推拉方式来确定的,选用与凸轮接触的推杆直径为3 mm。
当车体左转时,推杆与凸轮内表面轮廓线之间为点接触,经过计算得出每个点的曲率 ,轨迹上各点的曲率半径R 0 为
则可得到凸轮半径的计算公式。
当右转时,推杆与凸轮外表面轮廓线之间点接触,可得到凸轮半径的计算公式。
依据小车行驶轨迹的总长度s,计算出小车各段轨迹si 及所占总体轨迹的比例,由此可以计算出各段轨迹所占凸轮的角度为
凸轮的基准直径r与凸轮的轮廓密切相关,r变大,凸轮的基圆半径就变大,整个凸轮就变大,凸轮的轮廓变化率变小,则压力角变小。同时,凸轮的轮廓与凸轮内侧与小车中心线的距离k和小车前、后两轮的轴距d相关,距离k变大,凸轮的轮廓变化率变大,则压力角变大。轴距d变大,凸轮的轮廓变化率变小,则压力角变小。测量小车基准直径r后,凸轮的材料选择厚度为1 mm的钢板。
3.2 凸轮的优化与仿真
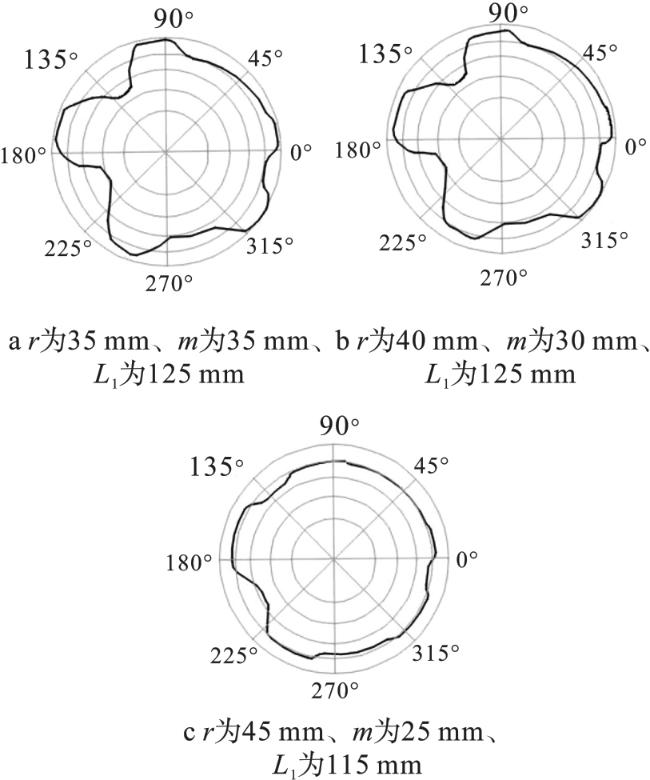
进一步综合考虑小车凸轮的压力角、运动平顺性及整体尺寸的限制,对参数进行优化调整,最终选取r为45 mm、m为25 mm、L 1为115 mm,通过MATLAB拟合分析得到优化后的凸轮仿真轮廓线,如图6c所示。优化后的凸轮轮廓曲率变化更加平缓,压力角显著减小,能够有效降低传动机构的摩擦损耗,增强小车的运动稳定性,提高运行效率。
4 电路模块设计

5 仿真与行驶验证
5.1 仿真验证
使用MATLAB软件对行驶轨迹进行分析,其中曲率最大值 ,那么曲率半径的最小值 ,小车车长L 1为110 mm,主动轮与小车中心的距离d 1为60 mm,可以计算出小车最大转角 ,转向部分设计合理。
同时,使用MATLAB软件分析凸轮轮廓线的曲率半径,曲率最大值 ,曲率半径的最小值 ,推杆机构工作稳定、可靠,凸轮设计具有可行性。
最后,将点位信息输入MATLAB中进行小车行驶路线仿真,验证小车的理论设计的正确性,通过输入小车电机转速、传动比及凸轮廓线等参数后,输出的小车仿真轨迹如图8所示。

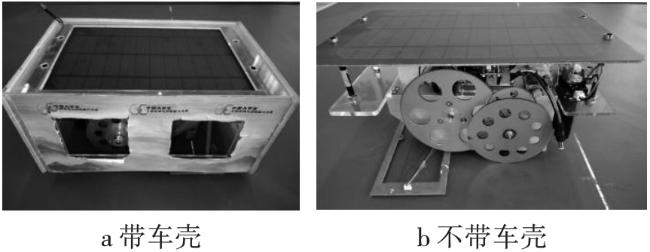
5.2 实际行驶验证
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
6 结论
利用B样条曲线对固定打卡点进行轨迹拟合,用MATLAB软件分析优化后得到凸轮结构,最后设计得到小车的方法整体效率较高,可以根据所需行驶轨迹的不同而快速调整凸轮形状,规划出不同的运动轨迹。采用不锈钢板材料切割制成的凸轮,材料硬度高,凸轮边缘不易磨损,可以保证重复实验时的精度。研究发现,凸轮基圆直径及转向推程对小车行驶轨迹影响较大,因此,在设计小车时应该设置转向微调机构,以满足小车轨迹调整的需要。
本文的小车设计、制作、微调及仿真方案具有通用性,可以为以后工程小车类竞赛及无碳小车的设计提供一定的参考。