

随着航空技术的不断进步,飞机起落架[1]的性能提升与智能化控制[2]成为研究焦点。磁流变起落架引入先进的磁流变材料[3]实现了减震、缓冲等性能的智能化调控[4]。然而,在长期使用过程中,磁流变阻尼器容易出现疲劳、老化甚至损坏的问题,导致减振性能下降,因此,针对磁流变阻尼器可能出现的故障情况,开发有效的容错控制策略至关重要。磁流变起落架控制方法主要有天棚控制策略[5]、模糊PID控制[6]、滑模控制方法[7]及综合反馈控制方法[8]等,其中模型参考自适应控制的磁流变起落架控制方法备受关注。
马晨龙[9]采用模型参考自适应控制(model reference adaptive control,MRAC)理论,通过自适应律调整系统参数变化,以减少或消除不确定性因素对速度的影响。宋亦静[10]针对泵控系统具有非线性、模型参数的不确定性及单出杆缸双向运行的不对称性等特点,设计了模型参考自适应控制器。Ma等[11]针对二自由度直升机姿态跟踪问题,设计了基于区间二型模糊逻辑系统的滑模控制器,考虑了故障值的变化率以准确估计时变故障。Tian等[12]提出利用故障观测器[13]估计的故障特征电流对匝间短路电流补偿的容错控制方法,进一步降低转矩脉动。Avram等[14]针对四旋翼无人机在执行器故障、模型不确定性和外部扰动下的控制问题,设计了基于固定阈值事件触发的双闭环自适应有限时间预定性能容错控制器。于漪丁[15]研究了磁流变阻尼器原理,并选取合适模型应用于起落架缓冲系统,建立落震动力学模型,采用模型参考自适应控制算法实现缓冲器控制。
基于上述分析,为了更好地解决磁流变起落架缓冲系统的鲁棒容错控制问题,本文提出了一种基于模型参考自适应容错控制的磁流变起落架缓冲系统方法,确保系统在故障情况下仍能稳定运行,并通过理论验证和仿真与传统被动式起落架机对比验证了其高效性。
1 磁流变起落架缓冲系统建模
1.1 着陆模型简化
飞机着陆时,分析起落架缓冲系统效率[16],只考虑垂直落震,忽略水平运动。将缓冲系统简化为弹簧和磁流变阻尼器,将机轮和轮胎简化为质量和弹簧组合。气动力大小与重力相等,只分析垂直受力,不考虑水平干扰和路面复杂度对轮胎位移的影响,采用二质量模型(质量-弹簧-质量)方便研究垂直落震特性。
根据牛顿第二定律能够得出弹性支撑质量的动力学方程为
式中: 为弹性支撑质量; 为弹性支撑质量的加速度; 为升重比; 为重力加速度; 为 方向上非弹性支撑质量对弹性支撑质量的作用力。
对于非弹性支撑质量的研究,在着陆环节中,也需要进行垂直方向分析,并不考虑水平上的相关问题。非弹性支撑质量的动力学方程为
式中: 为非弹性支撑质量; 为 方向上非弹性支撑质量的加速度; 为地面对非弹性支撑质量的弹力,其大小为 ; 为轮胎刚度系数; 为非弹性质量的位移。
式中: 为磁流变缓冲器的轴向力,数值上等于空气弹簧力 与磁流变阻尼力 这两部分力的和。
式中: 为起落架刚度系数; 为弹性质量的位移, 为阻尼器的位移。
根据Stanway提出的Bingham塑性模型,给出磁流变阻尼缓冲器结构,磁流变阻尼力由两部分组成,如式(5) 所示。
式中: 为磁流变液粘滞阻尼系数; 为可控的磁流变库伦力; 为与磁场强度相关的屈服力,其磁场强度受阻尼器控制电流 影响; 为阻尼器活塞的伸缩速度。
1.2 磁流变阻尼器动力学模型参数辨识
为了辨识出更加精准的阻尼器模型参数,本节采用最小二乘法对 Bingham 塑性模型进行基于分段多项式方法的参数辨识。首先,根据不同运动速度与磁流变阻尼力关系数据,使用最小二乘法对式(5) 进行线性拟合,随后求出压缩模式下不同电流下的模型参数 的值。相关参数如表1所示。
表1 压缩模式下不同电流对应的模型参数值 |
| /A | /N |
|---|---|
| 0.0 | 462.9 |
| 0.5 | 3 403.7 |
| 1.0 | 4 873.0 |
| 1.5 | 5 873.0 |
| 2.0 | 5 898.7 |
利用表1的数据,采用 MATLAB 曲线拟合工具箱对三次多项式进行曲线拟合,最后得出压缩模式下的系数。
压缩模式为
根据式(6) 可以得到压缩模式下的磁流变阻尼器逆模型为
2 磁流变起落架自适应控制器的设计
2.1 磁流变起落架容错控制系统描述
根据已建立的磁流变起落架缓冲系统模型,飞机起落架在着陆过程中会面临凹凸路面的干扰 ,所以依据牛顿第二定律可以得到起落架的微分方程为
式中: 为起落架刚度系数; 为轮胎刚度系数; 。取 为状态变量作为系统的状态方程。设 ,故可用以下状态空间方程表达这种具有扰动的不确定性系统,如式(10) 所示。
其中,矩阵 展开如式(11) 所示。
除此之外, ,系统的状态变量为 , 为代表磁流变缓冲系统的有界外部扰动输入信号(在本节中代表凹凸路面的扰动)。
是4阶单位矩阵, 、 、 、 分别为被控对象中弹性质量的速度和加速度、非弹性质量的速度与加速度。 为假设满足所谓的匹配条件的范数有界时变不确定性,即
式中: 为已知的具有适当维数的实常数矩阵。磁流变阻尼器的故障模式主要包括部分失效和卡滞。起落架磁流变阻尼器的故障模型为
式中: 为故障磁流变阻尼器的输出力; 和 为磁流变阻尼器时变效率因子; 为正常阻尼器的输出力; 为阻尼器发生卡滞时的故障值。 和 分别为 的已知下限和上限。根据实际情况,存在 ,定义 如式(16) 所示。
显然,当 且 时,磁流变阻尼器处于正常运作状态。当 且 时,表明磁流变阻尼器出现了断电故障;当 且 时,则表明磁流变阻尼器发生了卡滞故障。此外,当 且 时,则代表磁流变阻尼器处于部分效力故障状态。表2详细列出了这些故障情况及其相关描述。
表2 故障情况 |
| 故障模型 | 参数 | ||
|---|---|---|---|
| 正常 | 1 | 1 | 0 |
| 部分失效 | >0 | <1 | 0 |
| 卡滞 | 0 | 0 | 1 |
令 ,带有阻尼器故障模式的系统可以表示为
将 代入式(17) ,替换式(17) 的 ,并展开可得式(19) 。
为了实现容错控制的目标,引入以下标准假设:
2.2 容错控制器的设计
针对执行器故障所设计的控制器为
式中: 分别为控制器的增益系数; 为系统状态变量; 为扰动信号; 为误差信号。
本节主要侧重基于磁流变起落架模型的自适应容错控制策略的研究。
参考系统的参考模型如式(21) 所示。
根据
要想完全补偿卡死故障 ,必须使
根据线性代数的知识可知,式(23) 有解的充分必要条件是
由于 和 互为对角补偿的关系,因此式(24) 的成立必须使
所以设计控制器的总体控制状态方程为
定义参数误差矩阵为
式中: 和 分别为 和 的估计值,当 和 为常值时,设 。
定义状态跟踪误差
将上式求导,同时将式(25) 和式(20) 代入可得到如下结果。
根据参数误差公式可将式(29) 变形为
中各个参数设置分别为
式中: 为满足 方程 的正定矩阵。
由于 故存在正常数 满足不等式
由假设3和假设4可知,有不等式
将控制器参数 设置为
3 控制器稳定性的证明及系统仿真
3.1 控制器稳定性的证明
为了证明控制器的稳定性和收敛性,选取Lyapunov函数
对上式求导并代入公式可得
上述公式将矩阵 按列展开,则可改写为
代入lyapunov等式,有
为使 参数 的自适应律设计为
将自适应律的各个参数的值代入式(37) 得到如下所示。
由于
将式(42) 和式(34) 代入式(41) 可得
根据式
由不等式
式中: 为矩阵 的最小特征值,且 。
存在一个正常数 使下式成立
由式(48) 可得闭环系统信号 一致有界,因此 一致有界,可得
则由 引理可得
通过以上的理论证明和推导,可以得到所设计的控制器能够使状态变量 渐变跟踪参考信号 ,无论磁流变起落架阻尼器执行器出现故障、受到外界干扰,或两者同时出现时均都可实现。同时,由于磁流变起落架阻尼器是一个闭环控制系统,以上的证明也可以保证其信号一致有界稳定。
3.2 模型参考自适应容错控制方法仿真及分析
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
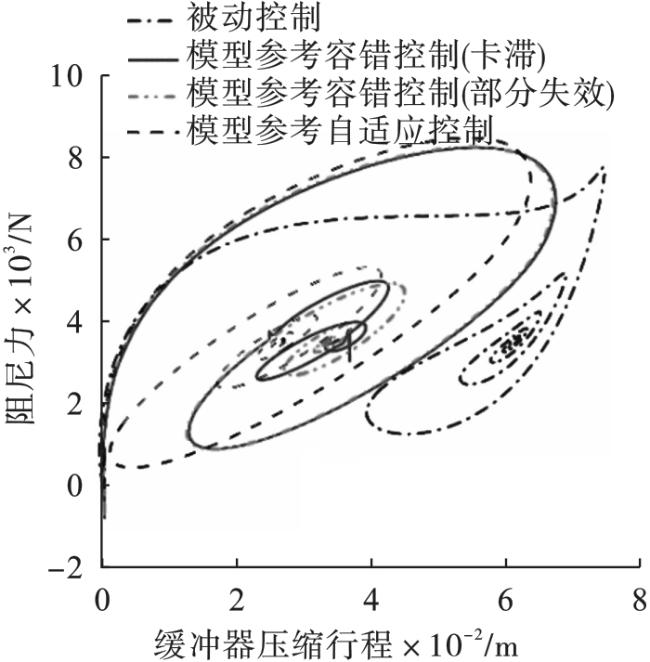
图2为起落架缓冲系统功量图,基于被动控制油气式缓冲器的最大阻尼力是7 815.9 N,相应的起落架最大压缩行程为 0.073 8 m,基于模型参考自适应控制的磁流变缓冲器输出的最大阻尼力是8 102.7 N,相应的起落架最大压缩行程为 0.070 04 m,基于模型参考自适应容错控制的磁流变缓冲器输出的最大阻尼力是8 311.6 N,相应的起落架最大压缩行程为 0.066 2 m,基于被动控制油气式缓冲器的缓冲效率为78.05%;基于模型参考自适应控制的磁流变缓冲器的缓冲效率为82.05%,基于模型参考自适应容错控制的磁流变缓冲系统卡滞故障模式下的缓冲效率为83.00%。基于模型参考自适应容错控制的磁流变缓冲系统部分失效故障模式下的缓冲效率为83.17%。
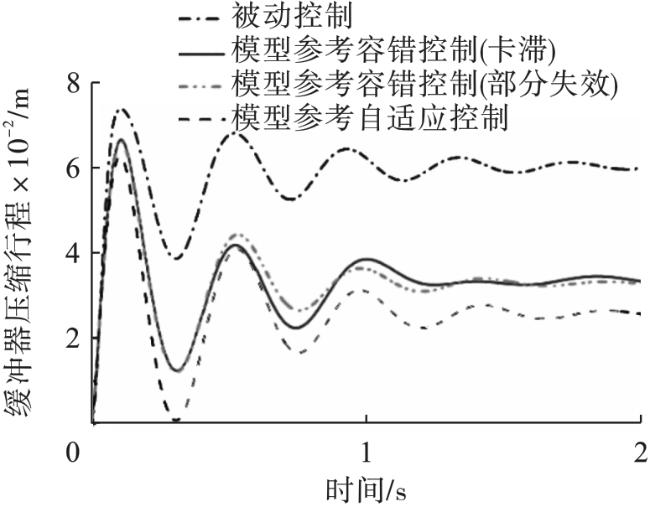
图3采用模型参考自适应容错控制的磁流变缓冲器的位移震荡幅度和震荡次数都要小于被动控制和模型参考自适应控制,达到稳定的时间也要早于被动控制。
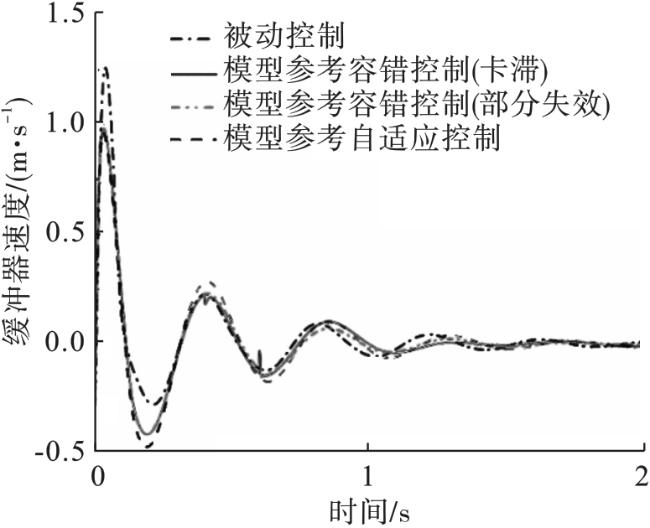
由图4可以看出,采用被动控制缓冲器的速度最大,采用模型参考自适应控制的磁流变缓冲器速度略大于模型参考自适容错控制的磁流变缓冲器速度。
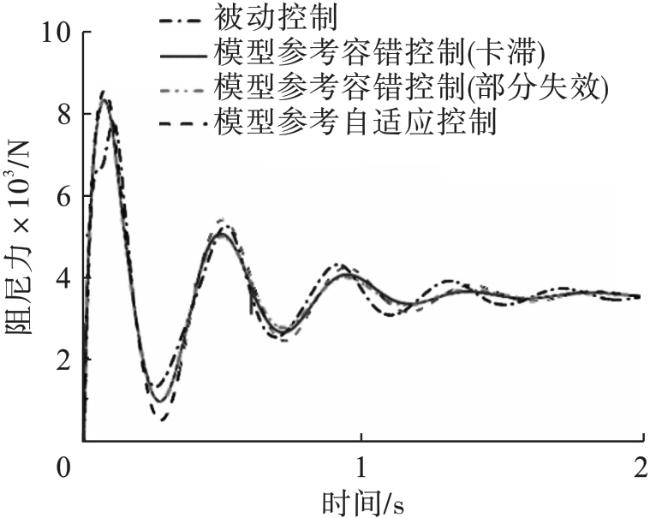
由图5可以看出,在阻尼器部分失效故障条件下,基于容错控制的磁流变缓冲系统输出的阻尼力是最大的;在阻尼器卡滞故障条件下,基于容错控制的磁流变缓冲系统输出的阻尼力次之,基于模型参考自适应控制的磁流变缓冲系统输出的阻尼力再次之,被动控制油气式缓冲系统输出的阻尼力最小。
因此,本文提出的模型参考自适应容错控制相比于被动控制方法和模型参考自适应控制可以使起落架达到更好的减震效果。
4 结论
本文设计了一种面向阻尼器故障的磁流变起落架缓冲系统的模型参考自适应容错控制方法。在控制方法的设计上,采用了自适应滑模容错控制策略,求解了相应的控制律。通过控制电流,磁流变缓冲系统能够调节其输出的阻尼力,从而有效补偿制故障对起落架缓冲性能的影响,并提升系统的缓冲效率。为了验证所设计的控制方法的可行性,进行了仿真试验。相比于被动控制和模型参考自适应控制,基于模型参考自适应容错控制的系统的缓冲效率分别提升了4.95%和0.95%。这充分证明了所提出的容错控制方法不仅能够确保系统的稳定性,还能有效补偿故障对磁流变起落架缓冲性能的影响,同时保持较高的缓冲效率。