

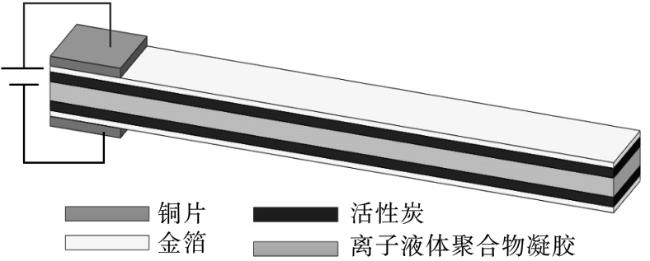
离子液体凝胶是一种新型软机器人致动器柔性材料,主要包含聚合物和离子液体两种成分。ILG混合溶液由4种原料组成,即1-丁基-3-甲基咪唑四氟硼酸酯(BMIMBF4)、甲基丙烯酸羟乙酯(HEMA)、2-二乙氧基苯乙酮(DEAP)和TiO2。在紫外线灯下,它们聚合形成凝胶状聚合物[1-2]。传统的柔性机构是一类利用柔性材料的弹性变形来传递或转换运动、力或能量的机构[3-4],在工作过程中需要外力提供驱动源,从而改变柔性机构的运动体。软体机器人是一种特殊类型的柔性机构,其机构本身具有主动变形能力,驱动机构提供驱动力和满足结构功能设计[5-6]。
1 基于ILG的软体致动器设计
2 离子液体凝胶驱动原理
离子液体BMIMBF4中阳离子BMIM+的体积远大于阴离子BF4 -的体积。当在致动器两侧施加直流电压时,在电场作用下,阴、阳离子分别向致动器电极的阳极、阴极侧移动,当离子液体穿过ILG凝胶层-活性炭层相互接触的边界时被活性炭吸附,分别积累在致动器两侧活性炭电极层上。假设致动器左侧电极板电压为正、右侧电极板电压为负,阳离子BMIM+向致动器右侧(阴极)活性炭层移动,阴离子BF 向左侧(阳极)活性炭层移动。当离子运动达到稳定状态时,由于阴、阳离子的体积差异,致动器阴极一侧体积增大而伸长,阳极一侧体积减小而缩短,导致整个机器人致动器向阳极一侧(左侧)弯曲。
3 离子液体凝胶致动器控制模型
ILG软体致动器的导电过程可以归纳为离子电流、位移电流、电子电流的综合作用。ILG的离子电流由阴、阳离子同时向相反方向运动形成。由于ILG致动器中电子电流的响应速度远快于离子电流响应,因此二极管的导通电压很低,机器人致动器施加的电压远大于二极管的导通电压,电子电流的初始瞬态过程与离子电流相比可以忽略不计[11]。忽略电子电流的非线性,通过致动器的电子电流的值是恒定的,采用纯电阻支路对整个致动器的稳态特性进行建模。
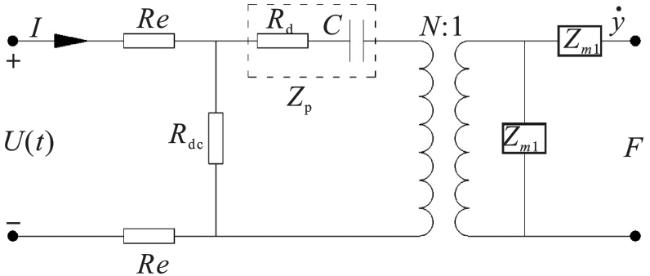
采用线性耦合方程对力学和电学性能之间的耦合进行建模,并利用悬臂梁弯曲变形模型建立软体致动器的输入、输出关系。在机电耦合的数学建模中,假定电学和力学域中的变量是线性耦合的,两个域之间的能量转换可以通过系统状态变量的变化实现。
忽略重力对软体致动器的影响,将其简化为悬臂梁型致动器,其结构参数如图3所示。在分析致动器的弯曲变形时,致动器变形前的轴线为X轴,垂直向下的方向为Y轴,致动器的总长度为L,自由端长度为Lθ,宽度为w,厚度为b。
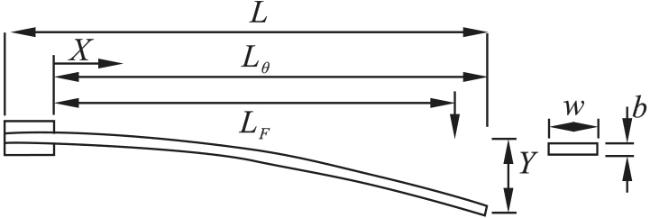
致动器在距支撑端距离LF 处施加的载荷F所产生的弯矩为
式中:x为沿梁的弯曲方向到固定端的距离。
结合悬臂梁边界条件,x=LF 处的表达式为
式中:E为杨氏(弹性)模量。
为了得到Zm 1的拉普拉斯域表达式,对式(2) 进行拉普拉斯变换并求解Zm 1。
Zm 2是一个惯性项,在模型中加入Zm 2的目的是为了扩展致动器的有效频率范围,从而提高模型在一阶固有频率附近的精度。Zm 2在拉普拉斯域中的表达式为[15]
式中: 为一阶固有频率; 为软致动器的密度。
图2电路中阻抗Zp 在拉普拉斯域的表达式为
采用网格电流法分析理想线性变压器模型中电压-电流的关系,网格电流方程与电压-电流的关系如式(6) 所示。
消去式(6) 中的中间变量 、 、 和 ,求解线性耦合方程组为
软体致动器时域的挠度表达式为
4 结构参数对软体致动器性能的影响
4.1 对末端位移的影响
在阶跃驱动电压作用下,软体致动器末端位移的时域表达式为
其稳态值为
致动器的理论位移与自由端长度与厚度之比的平方成正比,与致动器宽度无关。增加致动器宽度相当于多个窄致动器的平行排列,且每个软体致动器的运动相互独立,因此软体致动器的末端位移是相同的。
4.2 对驱动力的影响
在阶跃电压作用下,软体致动器驱动力的时域表达式为
稳态值为
软机器人的稳态驱动力与致动器的厚度和宽度成正比,与致动器的自由端长度成反比。由于ILG中所含离子液体的占比较大,而致动器的弹性模量较小,因此软致动器的驱动力较小。
5 离子液体凝胶致动器实验
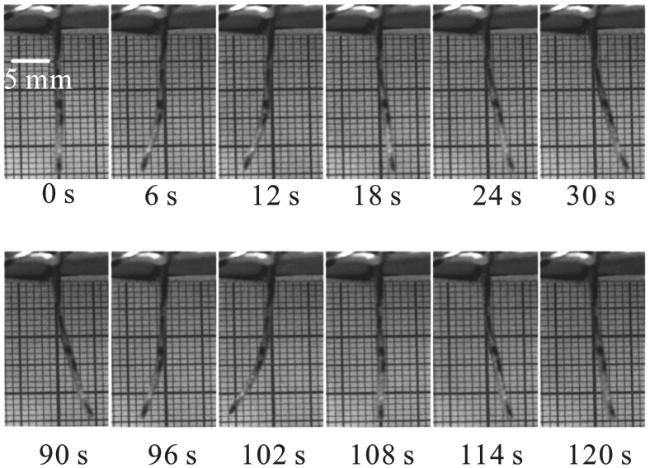
软体致动器测试的输入信号为方波,其幅值为4 V、周期为30 s、占空比为50%,数据采样间隔为0.064 s,位移读数的间隔为2 s。软体致动器尺寸为35 mm×5 mm×0.5 mm,其中,自由段长度为30 mm,凝胶层的平均厚度约为0.4 mm。
当致动电压为4 V时,选取空载情况下软体致动器两个周期内的摆动过程截图,如图4所示。其中,0~30 s的图片表示加电后第一个周期内软体致动器的运动过程状态;90~120 s的图片表示随机选取的一个周期内软体致动器的运动过程状态。当施加电压为4 V时,软体致动器左侧的最大摆幅为4.8 mm,右侧的最大摆幅为5.0 mm。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
在软体致动器的性能测试中,其左侧最大摆幅为4.7~4.8 mm,右侧最大摆幅为4.9~5.0 mm。右侧摆幅略高于左侧(差异约4.2%),但若需实现高精度控制,需进一步优化对称性,可能涉及致动器离子凝胶材料、活性炭电极,需进一步提高软体致动器制作工艺水平。
6 结论
本文对ILG软体致动器机电耦合模型进行深入研究,提出了完整的建模思路,为ILG软机器人机构和控制方法的设计提供了理论依据。基于Claudia Bonomo提出的离子聚合物—金属复合材料致动器电学模型,结合ILG材料的特性,建立了致动器机电耦合模型。结合拉普拉斯变换,在考虑致动器结构参数的情况下,导出了致动器的机电耦合方程组,给出了系统输入、输出变量的对应关系,描述了致动器的几何参数/材料特性参数对致动器末端位移和驱动力的影响。机电耦合灰盒模型有效地模拟了致动器的机电转换特性。结合几何参数/材料的机电耦合灰盒模型对ILG软体致动器具有较好的拟合性和较高的精度。