

近年来,多智能体系统在控制[1]、人工智能[2]、数学[3]、通信[4]等领域应用广泛,一致性控制[5-6]在多智能体控制领域是极为重要的研究方向。一致性控制是指多智能体通过协议和通信拓扑对智能体当前状态进行更新,从而达到一致性。随着多智能体系统在一致性控制研究中的逐步深入,现阶段取得了可观的研究成果。在实际情况中,诸多外部干扰会影响多智能体系统的一致性控制,从而导致系统不稳定。邵浩宇等[7]在固定拓扑条件下,利用事件触发机制实现对多智能体系统的一致性控制。
为确保多智能体系统实现一致性,各个智能体需要进行信息交互来更新当前状态,以实时保证系统的一致性控制。但在实际情况中,通信拓扑会受到时延和外部干扰的影响,使系统无法达到一致性。黄红伟等[8]、陈侠等[9]设计了一种控制协议,使多智能体系统在时延影响下,最终能实现一致性控制。Xie等[10]构建了一种控制协议,使具有切换拓扑的多智能体系统实现一致性。陈世明等[11]给出了一种结合自适应和事件触发机制的一致性控制协议,用于让不确定多智能体系统实现一致性控制。
传统的事件触发机制[12]能够依据设置的触发条件来判定当前数据是否需要传输。由于实际情况是动态变化的,事件触发机制无法满足系统在不同时期的不同需求。动态事件触发机制以传统事件触发机制为基础,通过引入动态变量,将其作为触发机制的阈值,使系统能够在不同情况对触发规则进行动态改变,可以有效消除连续采样的要求,增强系统适应性和对网络资源的利用率。Yang等[13]和Liu等[14]对领导跟随下的多智能体系统进行了研究,探索如何通过动态事件触发机制实现系统一致性。Sang等[15]对系统的动态事件触发机制的控制策略展开了深入研究。王柳等[16]研究了在动态事件触发下,一般线性下多智能体的一致性控制。然而,目前使用动态触发机制的系统模型都较为简单,并没有考虑不确定多智能体系统在切换拓扑、时延和外部干扰影响下的一致性问题。
本文研究了切换拓扑下不确定多智能体的一致性问题,并分析了切换拓扑、时延和外部干扰对不确定多智能体系统的影响。通过动态事件触发设计了一个控制协议,保证多智能体系统一致性的同时节约了网络资源。在时延控制输入下,构建了系统的闭环控制数学模型。基于图论、Lyapunov稳定性理论和线性矩阵不等式证明了通过动态事件触发机制下的控制策略能有效实现多智能体系统的一致性,并通过仿真实验证实了该控制策略的合理性和有效性。
1 图论
1.1 简介
有向拓扑图的节点对应多智能体系统的每一个智能体,智能体之间的信息传递用边表示。其中,通信拓扑用 表示, 表示节点集, 表示边集, 表示第 个到第 个智能体的有向边。 表示加权矩阵,若 ,则 ,否则 。度矩阵 , ,Laplacian矩阵 可表示为
1.2 不确定多智能体一致性问题描述
假设一个不确定多智能体系统含有 个智能体,每个智能体表示为
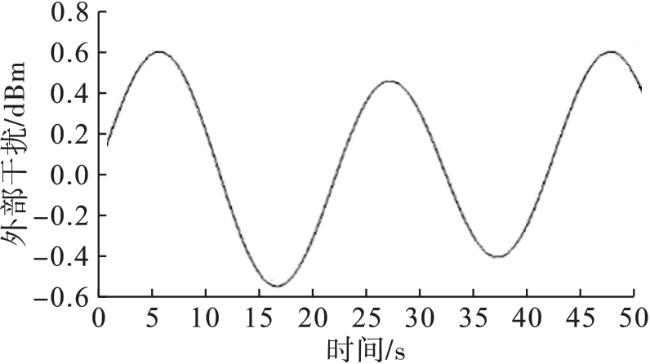
式中: 为多智能体系统中第 个智能体状态变量( ); 是控制输入; 表示外部干扰; 为智能体控制输入时的时延, ; 为随时间变化的扰动且 时延满足 ; 、 和 是常数矩阵; 和 是时变参数不确定性的实矩阵函数,如式(4 )、(5 )所示。
式中: 和 为Lebesgue的未知时变矩阵,且 , ; 、 、 、 分别为不确定参数。
考虑到不确定多智能体、时延和外部干扰的影响,设计一致性控制器在受到以上影响的情况下保证多智能体系统能达到一致性,如式(6) 所示。
式中: 为常数增益矩阵; 为智能体状态; 代表智能体 和智能体 之间没有通信传递; 为智能体 当前的控制输入,其初始条件为
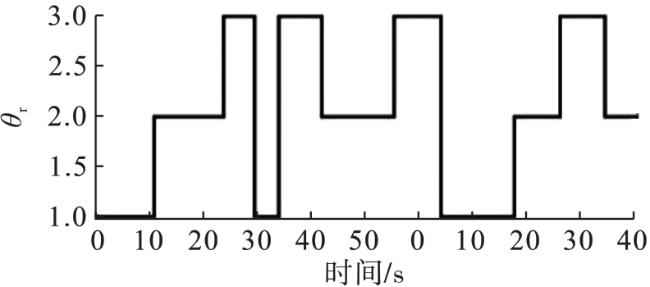
初始条件的集合在 时,函数 是任意的。当智能体 收到相邻智能体通信传递的新状态时,因为连续时间的马尔科夫链决定了智能体当前状态 的动态特性,智能体 会立即更新自身的控制器。其中,马尔科夫链的集合是离散状态,即 。概率转换矩阵 为
式中: 为智能体从拓扑 切换到拓扑 的概率且 ,有 成立; 为不确定转移矩阵 的元素。
式中: 为智能体从状态 切换到状态 的概率的估计值; 为该估计值的误差; 为未知且 ,其中 。当 , 时, 。马尔科夫链的初始分布可设为 。
不确定智能体系统的动态数学模型和设置的一致性控制器的成紧凑形式为
式中: 为状态向量; 为当前第 个智能体的输入向量。
则称多智能体系统(3)满足一致性。
1.3 动态事件触发机制
对多智能体系统的所有智能体 的事件触发条件为
式中: 为事件触发机制频率; 是事件触发机制采样信号。当满足触发条件时,智能体的当前状态会被采集,同时误差值 返回零。由式(13) 的事件触发条件可以看出,事件触发机制只受到智能体当前状态和误差的影响。相较于传统的事件触发机制,本文通过引入一个动态变量 来减少系统之间的触发次数并降低网络带宽,如式(15) 所示。
式中: 为满足Lipschitz连续的 函数; 在所有时刻上满足 且 ; 为阈值误差。设计动态事件触发规则,如式(16) 所示。
由于智能体在传递信息的过程中会不可避免地受到网络时延的影响,则 为事件触发机制的网络时延; 为网络时延的最大值。动态事件触发机制的控制器的表达式为
建立不确定智能体的紧凑形式和动态事件触发机制的控制器得多智能体的闭环方程。
其中, , , 。
2 一致性问题
通过树形转换法[17]替换闭环方程里的变量,将系统的一致性问题转换为分歧系统的稳定性问题。
将闭环方程写成紧凑形式
其中, , , , 且 ,利用性质 、 和 ,可得到分歧系统为
其中, , , , 。通过分析分歧系统(25)的稳定性,能够判断闭环方程式(18) 是否具有一致性。
成立。
其中, 。
3 一致性分析
证明:通过选取合适的Lyapunov函数,对闭环分歧系统式(25) 的稳定性进行分析可得
其中, 。假设式(37) 中所有的矩阵变量为正定,则 是正定的。依据Lyapunov函数稳定性判定方法,需要保证 和 。写出零项并整理可得
其中, 。
证明 ,对下Lyapunov函数进行求导计算,整理可得
所有触发频率 , 。 和 在动态事件触发条件下,选取新的Lyapunov函数 ,Lyapunov函数皆是正值且 径向无界。整理可得
其中
由此证明了 且任意时刻的 。当 时渐进收敛,多智能体系统在动态事件触发机制下达到一致性。
4 数值仿真
通过MATLAB进行仿真,证明本文提出的一致性控制协议的可行性。仿真设置了4个智能体,多智能体系统模型如图1所示。
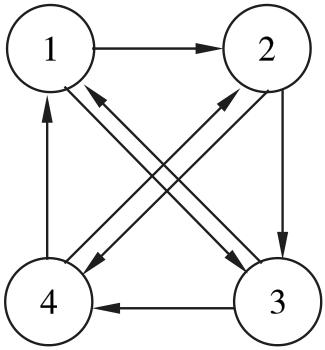
由图1得Laplacians矩阵为
设多智能体系统的运动模型为
其中,设智能体切换状态的估值 , 且 ,不确定度 ,则
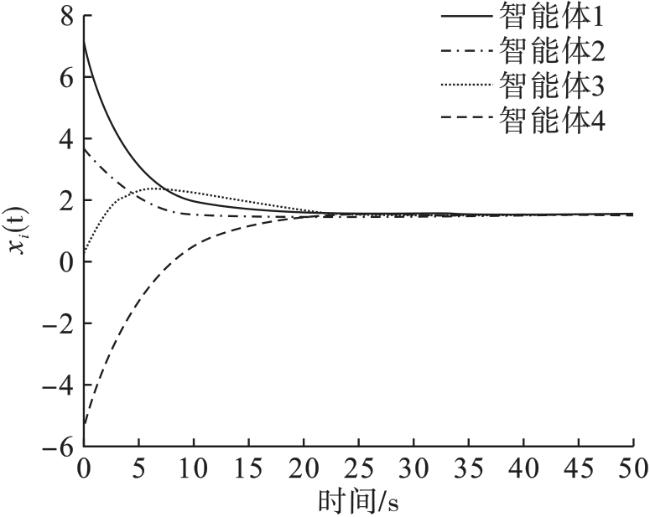
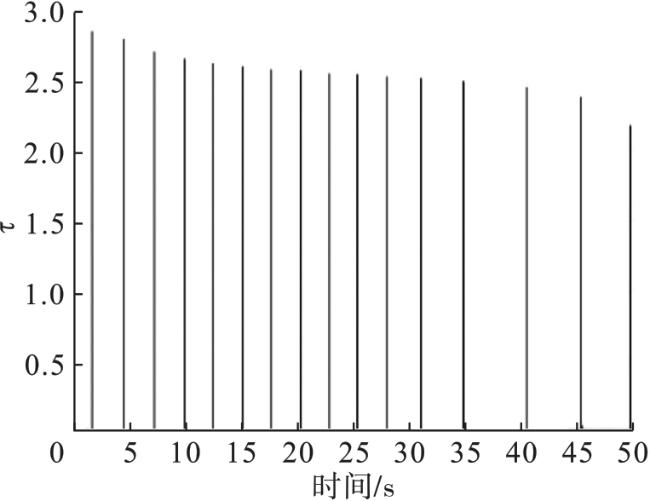
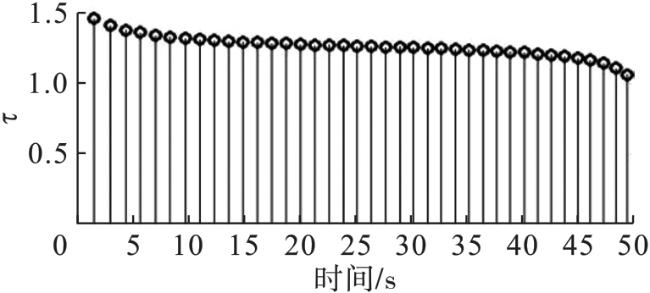
设智能体的初始状态 [7.8,3.8,0.2, ,时延上界 , 。当 时,在动态事件触发机制下多智能体状态响应曲线如图2所示。多智能体系统通过一致性控制器作用,在31.8 s时系统达到一致性,证明了本文设计的控制器对多智能体系统的一致性控制是有效的。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
由上述仿真图可知,本文通过动态事件触发机制所设计的一致性控制器,使多智能体系统在受到时延、外部干扰和切换拓扑的影响下,最终实现稳定性和一致性。
5 结论
本文针对受到外部干扰、时延和切换拓扑的影响下不确定的多智能体系统一致性控制问题进行研究,考虑实际情况中系统网络带宽带的有限性,提出使用动态事件触发机制以减少系统内部触发频率,降低通信带宽占比,优化系统性能。在设计一致性控制器时考虑了时延、外部干扰和切换拓扑对系统一致性控制的影响,利用代数图论、Lyapunov稳定性理论和线性矩阵不等式理论,证明了动态事件触发机制下设计的一致性控制协议的稳定性,通过数值仿真验证了本文设计的控制协议的有效性和实用性。