

随着人工智能技术的不断发展,目标意图识别逐渐成为现代空战中至关重要的一环。迅速而准确地判断目标的位置、速度及其潜在的决策动向可以帮助我方提前做好攻防准备,提高作战效率和胜率,而任何微小的迟疑都可能错失战机。然而,在高速的动态作战环境中,战场态势瞬息万变,目标的出现和隐藏变得异常快捷,导致敌方战机的各种行为特征、通信信号等信息难以捕捉,常陷入一种不完备的状态。与此同时,技术层面的挑战更复杂,使得当前对于空战目标意图识别的研究仍处于相对匮乏和滞后的情况。
现有的意图识别[1-2]方法主要有专家系统[3-5]、神经网络[6-8]、贝叶斯推理[9-11]、证据理论[12-13]等。仲照华等[1]利用全源分析系统(all source analysis,ASAS)的方法开展机载监视应用系统的分析和捕获工作,能够精确地识别敌方意图,但该方法主要依靠专家经验,易产生因主观偏差带来的识别误差,影响作战效果。李乐民等[3]设计了空中目标战术意图识别模型(multivariate long short-term memory-fully convolutional networks,MLSTM-FCN),通过提取数据局部复杂特征和时序特征,提高了意图识别的准确率,然而该模型存在识别效果需要依靠数据可靠性的不足。Meng等[7]将贝叶斯网络节点定义为意图识别目标数据的外部特征,采用贝叶斯优化算法构建空战意图识别模型,未考虑到意图识别是一个连续的过程,数据之间在不同时刻也存在一定的关联,影响了意图识别结果的准确性。
综上,本文提出了一种基于缺陷信息修正与主客观规则融合的动态证据网络(Information correction-subjective and objective rules-dynamic evidence network, IC-SOR-DEN)方法,来解决不完备信息环境下无人机空战连续目标意图识别问题。
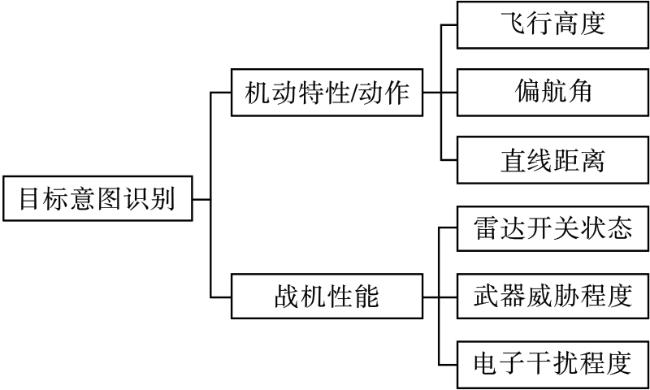
1 意图识别影响因素分析
2 基于IC-SOR-DEN的意图识别
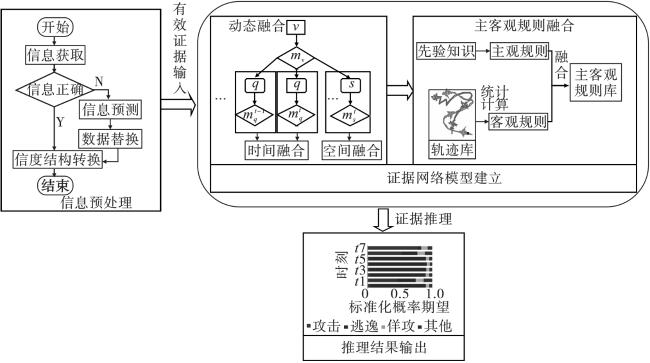
本文提出的基于IC-SOR-DEN的动态证据推理方法框架如图2所示,主要包括3个基本部分:信息预处理、证据网络模型建立及推理结果输出。其中,信息预处理环节主要负责对传感器收集到的信息进行缺陷判别及修正,并进行网络推理所需的信度结构转换。证据网络模型建立则考虑到对战过程中目标意图的变化是一个连续的过程,因此对定量信息模块采用兼顾相邻两个时间片信息的动态融合方式进行建模。同时,为避免定量信息突变导致的仅凭借先验知识构建的规则在复杂对抗环境下过于绝对的问题,采用基于统计计算[14]的方法,并通过构建轨迹库统计机动信息建立客观规则。而对由无人机性能决定的定性信息则采用专家知识和先验知识主观推理建立主观规则库。最终的推理结果则是采用证据推理的相关数学运算[15](扩展、合成、消元及概率测度计算等)输出。
2.1 基于证据修正的信息预处理
考虑到由于传感器信号失灵等因素会导致搜集到的定量目标信息出现数据错误、缺失等状况,引入LSTM神经网络构建轨迹预测模型,通过预测数据替换缺陷信息的方式进行缺陷证据修正。在此基础上将有效证据经隶属度函数转换为信度。而对于定性信息则采用模糊语言进行等级表述后转为证据结构形式,具体方法详见前期工作[15]。
2.2 时空融合动态证据网络模型构建
高对抗过程中,目标战机的飞行高度、偏航角、直线距离均为时序属性特征,在对此类信息进行融合以确定上层节点状态时,仅使用单一时刻数据往往缺乏合理性。为此,本文基于“时-空”动态融合的思想,将机动动作节点设计为由连续两时刻下的机动特性进行时间融合获取,同时将其对应的意图节点设计为由连续两时刻下的机动动作经过时间融合获取,在此基础上结合武器威胁、雷达状态、电子干扰与意图节点间的空间融合结果,构建模块化“时-空”融合动态证据网络模型,如图3所示。
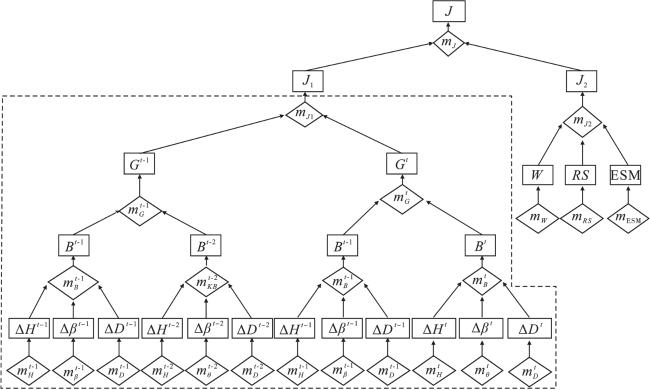
表1 节点变量识别框架及含义 |
| 节点变量 | 识别框架 | 含义 |
|---|---|---|
| [低,中,高] | 前后时刻飞行高度差 | |
| [小,大] | 前后时刻偏航角差 | |
| [近,远] | 前后时刻直线距离差 | |
| [低,中,高] | 武器威胁程度 | |
| [关,开] | 雷达状态 | |
| [低,高] | 电子干扰系统程度 | |
| 12种机动特性 | ||
| 7种机动动作 | ||
| [攻击,逃逸,佯攻,其他] | 意图及子意图 |
其中,依据目标无人机飞行轨迹特点划分出12种机动特性和7种机动动作。12种机动特性(B)具体为:B 1为转弯靠近俯冲、B 2为转弯靠近平飞、B 3为转弯靠近爬升、B 4为转弯远离俯冲、B 5为转弯远离平飞、B 6为转弯远离爬升、B 7为靠近俯冲、B 8为靠近平飞、B 9为靠近爬升、B 10为远离俯冲、B 11为远离平飞、B 12为远离爬升。而目标机动动作(G)由两个时刻下的基础机动特性融合而成:G 0为追逐、G 1为高强势回旋、G 2为低强势回旋、G 3为防御性桶滚、G 4为防御性盘旋下降、G 5为S形转弯(蛇形机动)、G 6为其他机动。
2.3 主客观推理规则库构建
本文基于数据类型的不同(定量和定性)提出了主客观规则融合的证据推理规则库构建方法,在定量证据节点信息( )与其上层节点(B)之间采用历史数据的统计计算构建客观规则库,而对于其他节点间的融合规则采用基于先验知识的主观设计方式。
2.3.1 基于统计计算的客观规则库生成
式中: 为轨迹属性数据;i为x的样本个数; 为 在其识别框架下的信度分配。
2) 确定每个属性x的参考值为
式中:参考值 的初始值根据专家知识给出;d为属性 的参考值个数。
3) 对于某一特定的属性样本值 ,通过式(3) 计算其关于参考值 的相似度分布。
式中: 为属性值 与参考值 的匹配度。
表2 属性 在 Bt 上的投点统计表 |
| … | |||
|---|---|---|---|
| 总计 | … | ||
| 1 | … | ||
| ︙ | ︙ | … | ︙ |
| n | … |
各定量属性变量的值在其识别框架下的信度分配具体为 ,其中:n为该属性值投点的个数;d为该属性值设定的参考值的个数。然后,将每个定性属性变量的12个机动特性(Bt )以统计表格形式整理、合并为所有机动特性下的投点统计表。样本在机动战术下的投点统计表如表3所示,其中 。
表3 样本在机动战术下的投点统计表 |
| Mi | … | 总计 | ||
|---|---|---|---|---|
| B 1 | … | |||
| ︙ | ︙ | … | ︙ | ︙ |
| B 12 | … |
易知, 。通过整理分析同一机动特性各变量在识别框架下的信度分配结果,最终获取客观数据统计的变化规律,即客观规则库。
表4 客观规则库 |
| 序号 | 条件 | [机动特性B,信度η] | 信任区间 |
|---|---|---|---|
| 1 | ∆H=0, ,∆D=0 | [1, 0.6][2,0.15] [8,0.05][11,0.05] [{1,2,8,11},0.15] | [0.9,1] |
| 2 | ∆H=0, ,∆D=1 | [4,0.7][5,0.15] [11,0.05] [{4,5,11},0.1] | [0.9,1] |
| 3 | ∆H=0, ,∆D=0 | [1,0.1][2,0.05] [7,0.55][8,0.1] [11,0.05] [{1,2,7,8,11},0.15] | [0.9,1] |
| 4 | ∆H=0, ,∆D=1 | [4,0.05][5,0.05] [10,0.6][11,0.15] [{4,5,10,11},0.15] | [0.9,1] |
2.3.2 基于先验知识的主观规则库生成
定性节点间的融合规则主要依靠先验知识分析与提炼。通过查阅大量文献并咨询专家,针对表1中定性属性节点进行了关联性分析并基于变量识别框架,构建主观规则库。
表5 主观规则库1(部分) |
| 序号 | 条件 | [机动动作G,信度α] | 信任区间 |
|---|---|---|---|
| 1 | B 1、B 2 | [0,0.7][6,0.2][{0,6},0.1] | [0.9,1] |
| 2 | B 1、B 2 | [0,0.6][2,0.2][6,0.1][{0,2,6},0.1] | [0.9,1] |
| 3 | B 1、B 3 | [0,0.2][2,0.6][6,0.1][{0,2,6},0.1] | [0.9,1] |
| 4 | B 1、B 5 | [6,1] | [0.6,0.8] |
| 5 | B 1、B 6 | [3,0.7][6,0.2] [{3,6},0.1] | [0.9,1] |
表6 主观规则库2(部分) |
| 序 号 | 条件 | [意图J,信度γ] | 信任区间 |
|---|---|---|---|
| 1 | G 1=0 G 2=0 | [0,0.7][3,0.2] [{0,3},0.1] | [0.9,1] |
| 2 | G 1=0 G 2=1 | [0,0.7] [3,0.2] [{0,3},0.1] | [0.9,1] |
| 3 | G 1=0 G 2=2 | [0,0.7] [3,0.2] [{0,3},0.1] | [0.9,1] |
| 4 | G 1=0 G 2=3 | [1,0.1][2,0.7][3,0.1] [{1,2,3},0.1] | [0.9,1] |
| 5 | G 1=0 G 2=6 | [2,0.7] [3,0.2] [{2,3},0.1] | [0.9,1] |
表7 主观规则库3(部分) |
| 序号 | 条件 | [意图I,信度σ] | 信任区间 |
|---|---|---|---|
| 1 | W=0 RS=0 ESM=0 | [0,0.2][1,0.25][2,0.2] [3,0.2][{0,1,2,3},0.15] | [0.9,1] |
| 2 | W=0 RS=0 ESM=1 | [0,0.1][1,0.45][2,0.1] [3,0.2][{0,1,2,3},0.15] | [0.9,1] |
| 3 | W=0 RS=1 ESM=0 | [0,0.2][1,0.2][2,0.25] [3,0.2][{0,1,2,3},0.15] | [0.9,1] |
| 4 | W=1 RS=0 ESM=0 | [0,0.25][1,0.2][2,0.2] [3,0.2][{0,1,2,3},0.15] | [0.9,1] |
将客观规则库和主观规则库1、2、3(部分)合并,共同形成无人机空战意图识别的总体规则库。
3 仿真试验
假设在某次一对一空战中,敌我双方无人机战况胶着,急需分析敌机意图,以便于我方做出决策,双方对抗轨迹的复杂意图场景如图4所示。将敌机飞行轨迹上的位置点①~⑧设为推理时刻,可见,前2个时刻敌机位置在我机前方,不具备攻击条件,处于劣势,随后敌机以蛇形机动拉长双方战机距离,摆脱我方追击,最后采取低强势回旋机动牺牲高度向我方靠近,转为进攻。
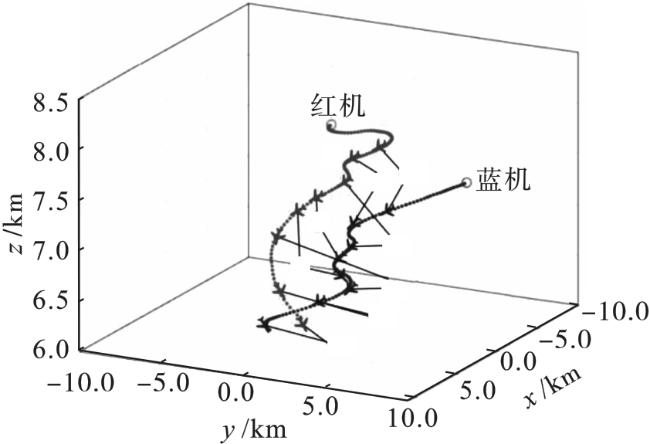
表8 运用情况及符号定义 |
| 机制 | 方法 | |||
|---|---|---|---|---|
| IC-SOR-DEN | A | B | C | |
| 缺陷信息修正 | √ | √ | √ | |
| 动态融合 | √ | √ | √ | |
| 主客观规则库 | √ | √ | ||
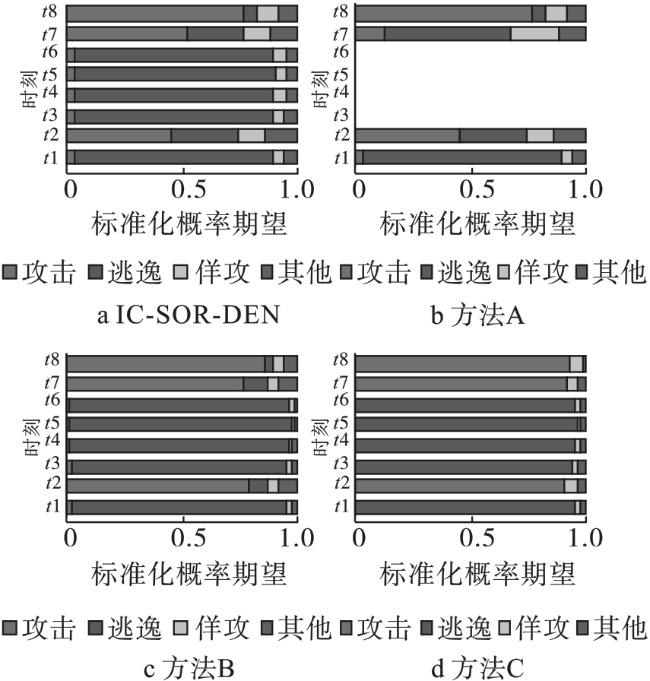
经仿真获取4种方法的目标意图识别结果如图5所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
由图5可知,本文所提方法推理结果为:t1时刻约90%逃逸;t2时刻约50%攻击和30%佯攻;t3—t6时刻均约为90%逃逸,t7时刻约50%攻击和30%逃逸;t8 时刻约为80%攻击,目标意图识别结果与图4对抗过程分析一致,意图识别正确。与之相比,缺少缺陷信息修正的方法A在t1、t2时刻意图识别结果与本文方法一致,但t3—t6时刻由于信息缺失无法识别意图,t7时刻信息突变使得此意图识别结果与实际有较大偏差。而缺少客观规则库的方法B虽然主要意图识别结果与本文方法一致,但在t2、t7时刻攻击与逃逸意图转换突然,缺少中间过程,与实际不相符。缺少动态融合和客观规则库的方法C的实验结果较方法B在t2、t7时刻的意图转换更突然,同样具有主要意图过于绝对,不符合实际的问题。综合4组实验结果,本文针对空战目标意图识别问题的3项改进机制均合理有效,在不完备信息的高对抗环境下能够给出持续准确的推理结果。
4 结论
为了实现在缺陷信息下的连续意图识别,解决现有推理规则主观性较强、模型固化缺乏时间因素考量等问题,提出一种基于缺陷信息修正与主客观规则融合的动态证据网络方法,并通过复杂意图下的仿真实验验证了该方法的有效性。主要结论如下:
1)针对信息不完备引起的信息缺陷时刻对目标意图识别错误的问题,提出了利用目标轨迹预测机制进行缺陷数据插补的方法,确保了连续推理结果持续有效。
2)考虑定量证据信息在时间维度的关联性,建立模块化基于“时-空”动态融合机制的证据网络模型,降低了由单一时刻证据进行推理导致的目标意图识别信度偏差。
3)提出了基于统计计算的客观规则设计方法,并结合主观经验共同构建推理规则库,解决了单纯利用先验知识建立推理规则而主观性较强导致的推理结果较片面的问题。