

在电动直升机的电动力系统中,设备平台作为电池箱、电机及控制器等关键组件的固定结构,不仅承担着核心支撑作用,还深刻影响整体布局设计的合理性,是新能源飞行器的关键部件之一[1]。动力电池在运行过程中易受振动影响,长期振动可能导致安全事故,在新能源设备故障中占据较高比例,不仅威胁到乘客的生命财产安全,还加剧了公众对新能源飞机安全性的担忧,不利于绿色航空事业的健康发展。
为确保电驱动系统中动力电池的安全稳定运行,电动设备平台必须具备足够的强度和刚度。宁嘉[2]通过模态理论和有限元法优化了机体结构动力学模型,并分析了某机体振动特性。苏云征等[3]提出了一种基于有限元的直升机振动载荷仿真分析方法,提取了振动环境载荷谱,并分析了疲劳寿命。李德玉等[4]基于精细有限元法建立了直升机尾传动系统的三维仿真模型,并分析了瞬态应力分布和振动情况。曹京军等[5]分析了电动直升机的性能特点,与传统直升机相比,电动直升机具有更好的垂直性能和水平性能,在噪声、振动、可靠性和使用成本上具有优势[6]。刘涛[7]以电动汽车电池箱为研究对象,进行随机振动疲劳分析,为电池箱的设计和改进提供了参考。范汪明等[8]对某无人直升机设备平台进行随机振动分析,将振动谱转化为纯随机振动,建立有限元模型,为设备平台的设计提供了支持。余瑾等[9]对直升机小速度前飞状态下的振动机理进行研究,分析结构动响应和载荷特征,揭示了振动问题的机理。梁震涛等[10]针对直升机机载设备安装架结构进行随机振动分析,将随机加正弦的振动谱转化为纯随机振动,为设备安装架的设计提供了依据。孙东红等[11]探讨直升机振动环境的特点,分析直升机机载设备振动环境试验的有关问题,为直升机机载设备的振动环境试验提供了指导。
在冲击载荷与结构优化方面,赵鑫[12]对铝合金波纹夹芯板进行冲击载荷下的试验研究和数值仿真,分析其在低速和高速冲击下的动态响应、损伤模式和耗能特性,为结构设计和优化提供了数据支持。张佳利[13]基于能量法建立冲击载荷条件下的可靠性模型,分析结构的强度退化和冲击载荷的作用,为机械结构的可靠性评估提供了方法。崔健禄等[14]结合静力学、瞬态响应计算和试验验证,分析了电子设备在冲击载荷下的结构强度。史峰源等[15]结合双向渐进结构优化和等效静力载荷方法,通过内外双层循环实现单相和双相复合材料的拓扑优化。
国外在直升机振动控制领域的研究主要集中于主动控制技术、减振设备开发和振动机理分析等方面。Wei等[16]构建了直升机-发动机耦合模型,评估发动机动力学对悬停及低速飞控质量的影响,发现影响飞控质量的诸多因素。Li等[17]针对小型无人直升机扰动下的姿态跟踪控制,设计了自适应 RBF扰动补偿回溯控制器。Jang等[18]研究了直升机主旋翼弹性体轴承的初始尺寸、制造工艺,通过有限元建模分析,确认其结构安全,提升制造可靠性。Xu等[19]基于直升机配平条件和飞行参数,建立了主旋翼动力学模型,结合自由尾迹法等,研究飞行中旋转条件的影响,揭示推力、气动载荷等的变化规律。
本文在国内现有的电动直升机设备平台基础上,分析了电动直升机运行过程中所受振动、冲击载荷对电动力系统设备平台的影响。首次系统地分析了电动力平台的材料特性与随机振动、冲击响应的关系,提出设备平台在动态环境下的优化方向。结合试验与仿真技术,发现随机振动高频段(70~300 Hz)对关键部件稳定性影响显著,为新能源航空设备平台的设计提供了支持和参考。
1 仿真分析
1.1 电动直升机设备平台有限元仿真
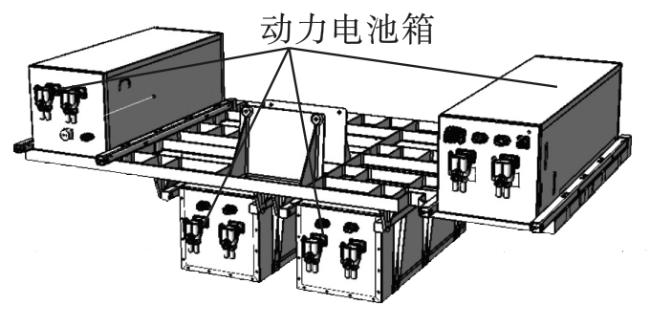
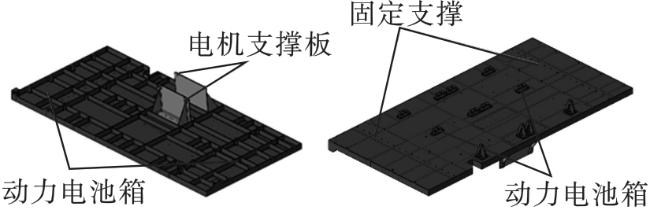
电动直升机设备平台是电动直升机固定动力系统的重要构件。在此平台上,关键的动力系统部件如动力电机、电池、电机控制器及高压盒等得以集中布局。这种高度集成化的布局实现了动力系统的高效整合,并显著提升了动力系统的整体性能。首先,集成化设计显著优化了电动直升机的整体布局,使结构更加紧凑且合理。部件间的紧密连接确保了系统的稳定性和可靠性,同时为直升机的操控和运行提供了有力支持。其次,集成化设计为维护检修带来了便利。此外,控制器信号在电动直升机设备平台上的传输更为可靠。高度集成化的布局减少了信号传输路径中的干扰和损耗,确保控制器指令的准确传递,从而提升电动直升机的操控精度和响应速度。
设备平台材料选用7075铝合金,其力学性能卓越,其弹性模量为71 GB,主要表现在强度高,屈服强度可达503 MPa。同时,该材料韧性良好、抗冲击、密度仅为2 810 kg/m3,在航空航天领域应用广泛,可减小结构质量。此外,该材料还具备出色的导热性、易加工及良好的抗腐蚀性,具体参数为弹性模量为716 GPa、屈服强度为503 MPa、密度为2 810 kg/m3、泊松比为0.33。
在保证计算精度的前提下,将设备平台进行如下简化:通过Hypermesh对模型进行几何修复与抽取中面,填充与计算无关的孔,为设备平台进行材料定义等前处理操作。网格划分采取壳单元全四边形网格划分方法,提高计算精度的同时能够节省计算时间。整体网格单元数量52 513个,节点54 102个。网格单元质量(element quality)为0.961,偏态(skewness)为0.003,正交质量(orthogonal quality)为0.984。网格单元质量良好,可以进行后续的计算。
1.2 设备平台的预应力模态分析
为保障电动系统中动力电池、高压盒、控制器等部件的安全稳定运行,电动系统设备平台必须具备足够的结构强度与刚度。在飞行过程中,机械结构会受到多种外部激励的影响,而飞行器所承受的外部激励更为复杂多变。当外部激励频率与结构固有频率相近或相同时,可能会诱发强烈的共振现象,导致结构振动幅度显著增大。在外部激励的长期作用下,结构可能因无法承受由此产生的巨大应力而发生失稳甚至损坏。因此,针对电动直升机设备平台进行振动分析,确保其各项动态参数满足使用要求,对于预防振动破坏引发的一系列安全问题具有极其重要的意义。
网格划分工作完成后,根据该电动直升机设备平台的实际运行工况,对设备平台在预应力状态下的固有模态进行分析。将4块动力电池单元各自简化为向下700 N的均布力,电机模块简化为向下300 N的均布力,控制器与高压盒等质量影响不大,可以忽略。主板底部两排孔施加固定约束,在简谐载荷的作用下振动方程为
式中:[ M ]为质量矩阵;[ C ]为阻尼矩阵;[ K ]为刚度矩阵;[ X ]为系统的位移矩阵;[F]为系统所受到的外部激励。由于阻尼影响较少可以忽略,对式(1) 做如下变换
线性系统的位移
式中:A为振幅;ω为固有频率; 为相位角。
联合式(2 )、(3 ),可得出结构固有频率方程如式(4) 所示。
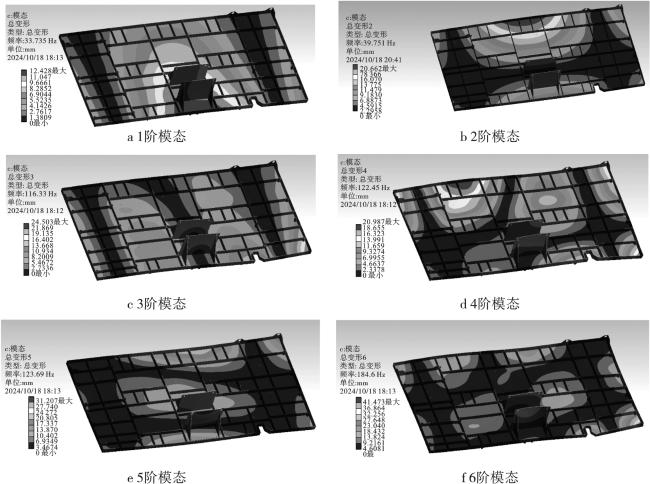
模态分析结果表明,设备平台的前6阶模态频率分布在 33.735 Hz至 190.160 Hz。其中,第1阶模态和第2阶模态属于低频模态,主要表现为整体纵向刚性振动和局部扭转振动,需重点关注其与电动直升机旋翼或电机运行频率的耦合风险。高阶模态(如第6阶模态)主要为局部高频振动,最大变形量为 41.473 mm,集中于边缘支撑和连接区域,设计中可适当优化局部刚度以减小动态响应。综合来看,设备平台整体动态性能满足设计要求,局部区域的刚性优化可进一步提升其抗疲劳性能。
1.3 谐响应分析
电动直升机在飞行过程中,振动现象由多种因素共同作用,旋翼产生的激励占主导地位,包括桨叶旋转产生的气动力、桨叶在制造安装过程中可能出现不平衡、旋翼受空气动力作用产生的不平衡等。例如:主旋翼桨叶前行和后行过程中,由于桨叶处于不同方位角,旋翼升力会产生较大差异。桨叶每旋转一圈,就会受到一次明显的空气动力脉冲,频率大概在4次/秒。
本文谐响应分析方法为模态叠加法,基于无阻尼实特征值的模态分析结果,并通过模态阻尼引入阻尼效应,利用刚度矩阵和质量矩阵 对方程解耦。由模态分析结果可得,设备平台的固有频率是33.375~229.73 Hz,在谐响应分析时,激励频率范围应涵盖固有频率范围,所以,谐响应分析的激励频率设置为20~230 Hz。谐响应分析得到的频响曲线如图4所示。
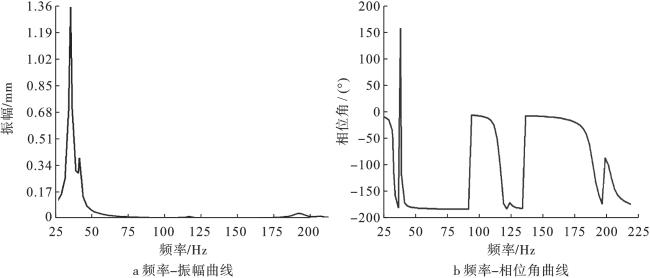
从图4可以看出,在固有频率为33.735 Hz附近,振幅达到峰值1.36 mm,变形量处于安全可控范围,结构中的应力水平远低于7075铝合金的屈服强度,验证了设计结构的安全性和稳定性。主应力分布均匀,未出现显著应力集中现象,表明平台能够有效抑制共振风险。
1.4 随机振动分析
电动直升机在飞行过程中,其周围气流十分不稳定。大气中湍流、风切变等因素使直升机受到随机的气动力作用,而在电机工作过程中,由于电机内部电磁力不均匀、转子不平衡等因素,同样会产生一定程度的振动,这是随机振动,其幅值、相位、频率都是随机变化的,无法用特定函数进行描述,而且可能传递到机身上并引起机身的共振。本文针对电动直升机所受随机振动的影响,采用PSD谱的方法进行描述,在ANSYS环境设置中,依据GB/T 2423.56-2023中的规定,基于以下的PSD加速度谱对电动直升机设备平台进行随机振动分析。
随机振动加速度PSD谱主要来源于标准规范和实际工况的模拟。
依据GB/T2423.56-2023标准,5~500 Hz的典型机械振动频段对应的随机振动试验条件如表2所示。其中,中频段(70~300 Hz)振动能量达到峰值2.0 (m/s²)²/Hz,涵盖设备主要响应区域。同时,该谱可能结合了电动直升机的实际运行工况,如旋翼低频激励、电机运转引发的中频振动及高频电磁噪声,确保测试条件贴近真实振动环境。
表2 随机振动试验条件 |
| 频率/Hz | 加速度功率谱密度/(m·s-2)2·Hz-1 |
|---|---|
| 5 | 0.2 |
| 70 | 2.0 |
| 300 | 2.0 |
| 500 | 0.2 |
将参数输入Workbench进行仿真,随机振动变形与应力云图如图5所示。
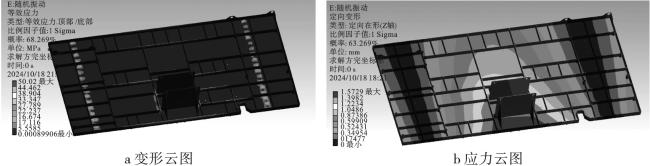
随机振动分析结果表明,设备平台的主要动态响应集中于70~300 Hz频段,最大变形量为1.572 9 mm,最大应力为50 MPa,符合材料屈服强度要求。振动能量集中在中频段,可能与电机电磁振动和旋翼气动力激励频率范围重叠有关,需重点关注此频段对平台局部刚性和疲劳寿命的影响。分析发现,应力主要集中于边缘支撑点和电池箱固定区域,这些区域在长期振动作用下可能出现疲劳损坏风险,建议增加局部刚度或引入阻尼材料以降低动态响应幅值。
1.5 冲击响应
电动直升机在起飞瞬间,需快速克服重力与阻力及降落过程中姿态控制不当等因素的影响,机身会受到一定程度的冲击载荷。
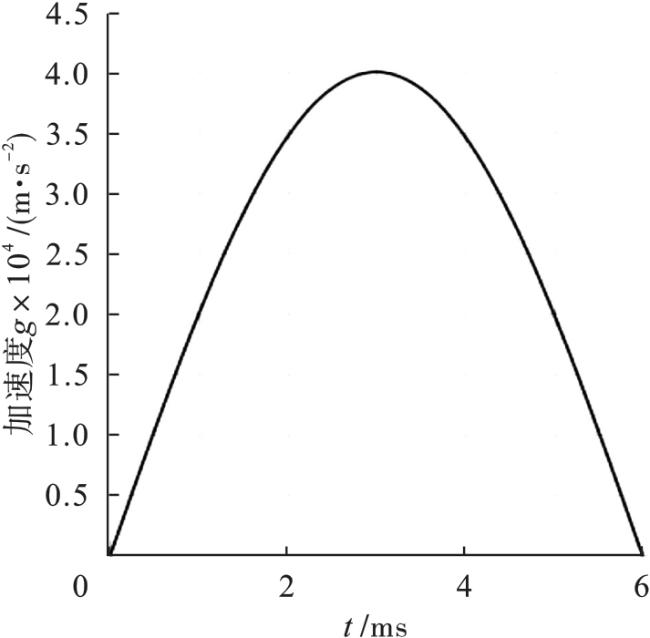
对设备平台进行瞬态结构响应分析,首先要确定设备平台承受激励的载荷曲线,结合设备平台的实际工况,冲击载荷设置为4 倍重力加速度,作用时间为6 ms,沿Z轴方向冲击2次。在Workbench仿真环境中,对设备平台底部固定约束,设置Z向激励,冲击载荷加速度-时间曲线如图6所示,方法采用模态叠加法,基于已求解的模态数据可以更快得出结果,节省计算时间。
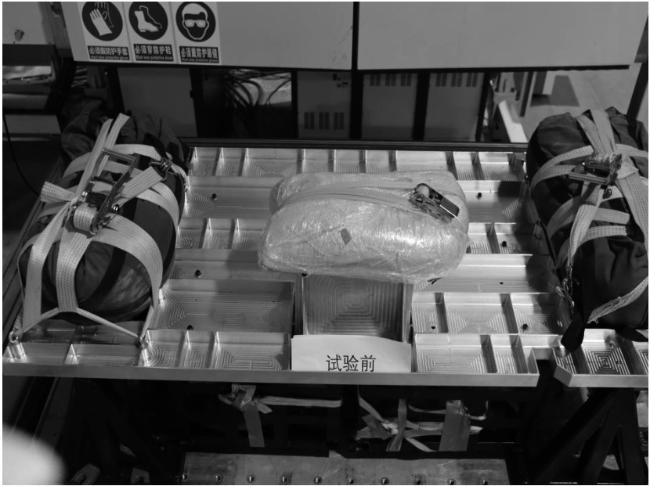
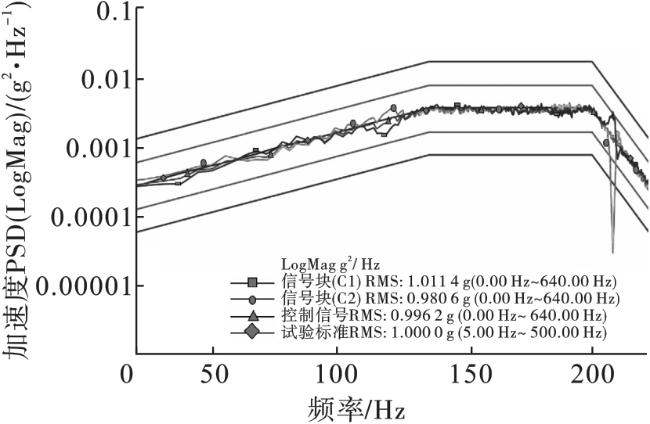
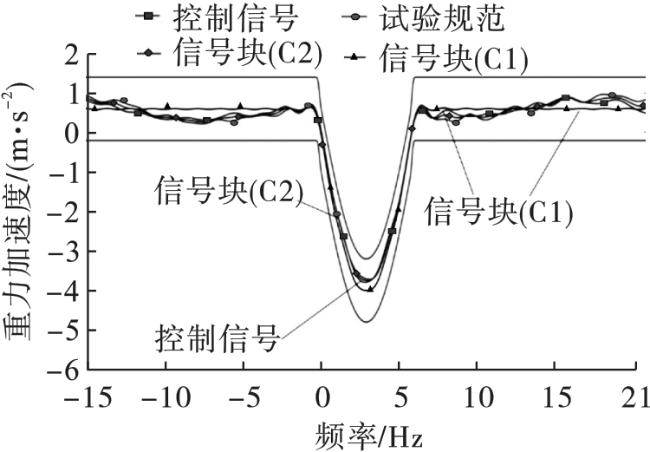
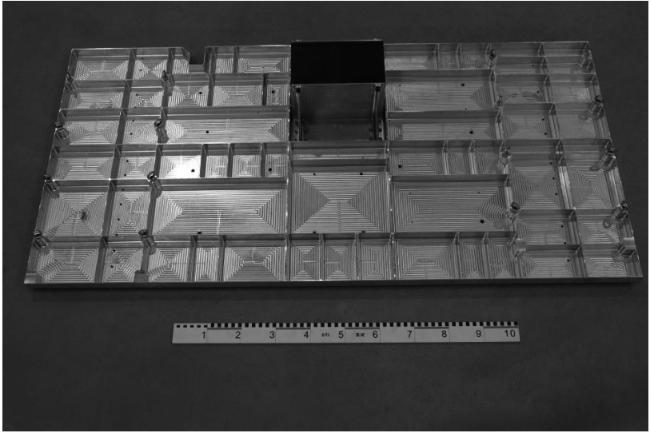
2 试验验证
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3 结论
1)模态分析结果表明,平台的前两阶模态频率分别为33.735 Hz和39.751 Hz,需重点关注其与运行工况的低频激励可能产生的耦合风险。谐响应分析揭示了平台在固有频率范围内的动态响应特性,最大振幅为1.368 mm,主应力为 14.425 MPa,显著低于材料屈服强度,验证了平台在稳态振动下的安全性。
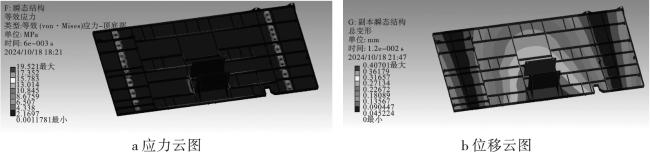
2)随机振动分析表明,设备平台的振动响应主要集中在70~300 Hz频段,最大变形量为1.572 9 mm,应力分布均匀,但在边缘支撑点和电池箱固定区域出现局部高应力,需通过局部刚性优化和振动隔离设计进一步提高抗疲劳性能。冲击响应分析显示,设备平台在4 倍重力加速度峰值冲击条件下最大应力为11.464 MPa,变形量仅为0.4 mm,均显著低于7075铝合金的屈服强度,表明平台具备良好的抗冲击能力。
3)通过对试验结果与仿真分析的系统对比,本文验证了所建立仿真模型在振动与冲击环境下的准确性与适用性。该模型可用于进一步预测复杂工况下的样品动态响应,为结构设计优化提供理论依据。