

在输变电工程中,导线压接工艺水平直接关系到电网运作的安全性、标准化及运行效率[1]。传统的手工压接方法因劳动强度大、依赖操作者技术且一致性难以保证而逐渐被自动压接技术所替代[2]。因此,实现导线的自动化压接是保证输电线路在电力系统中平稳运行的有效方式。国内外相关单位对输电导线压接的技术研究已取得很多研究成果,Weigelt等[3]将机器学习算法应用于超声压接过程中,该方法利用机器学习算法来分析和预测超声压接过程中的复杂性。Jongwuttanaruk等[4]通过响应面方法建立了压接过程的优化模型预测和优化压接过程的参数,从而实现最佳的压接质量。Ali等[5]提出磁脉冲压接以提供更均匀的压力分布,减少金属线束之间的间隙,从而降低接触电阻和温升,改善了导线之间的连接质量。国内对导线压接技术也进行了大量的研究,薛光辉等[6]采用直接驱动液压泵控制缸技术设计了一种电驱液压式大截面导线压接设备的速度控制系统,并通过仿真和试验验证了该系统的性能。白皓伟等[7]提出一种具备导线压接功能的液压张力机设计方案,该方案在现有的液压张力机和液压系统上增加了一个增压系统,以实现现场导线的压接工作。武磊等[8]设计了一套基于比例、积分、微分控制的恒压力压接的控制系统,提升了产品的合格率。
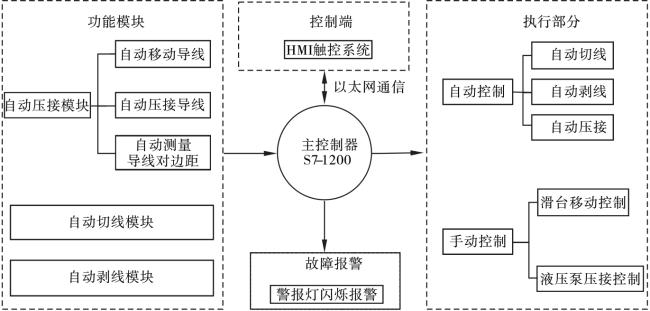
本文在传统输电线路压接技术的基础上,设计了一种以PLC为下位机,以人机交互监控界面为上位机的导线自动压接控制系统,实现导线的自动移动、自动压接及自动测量导线对边距等功能。为了实现导线的精确压接,本文提出基于博途平台SCL语言编写模糊PID控制算法,可自适应调整控制参数,有效降低超调量,保证输电导线的压接工作高质量完成。
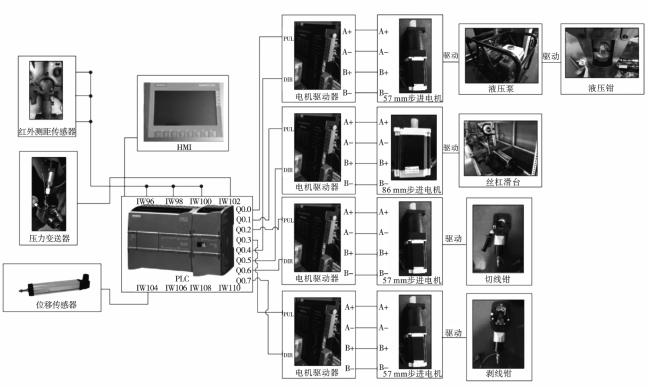
1 输电线路自动压接系统硬件设计
2 自动压接模糊PID控制算法设计
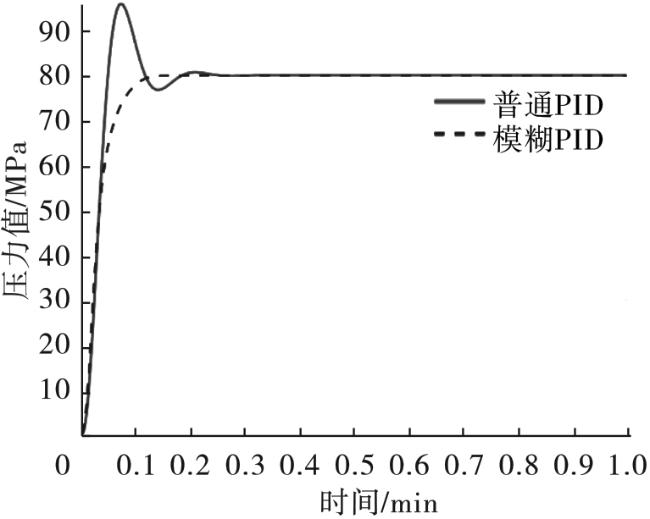
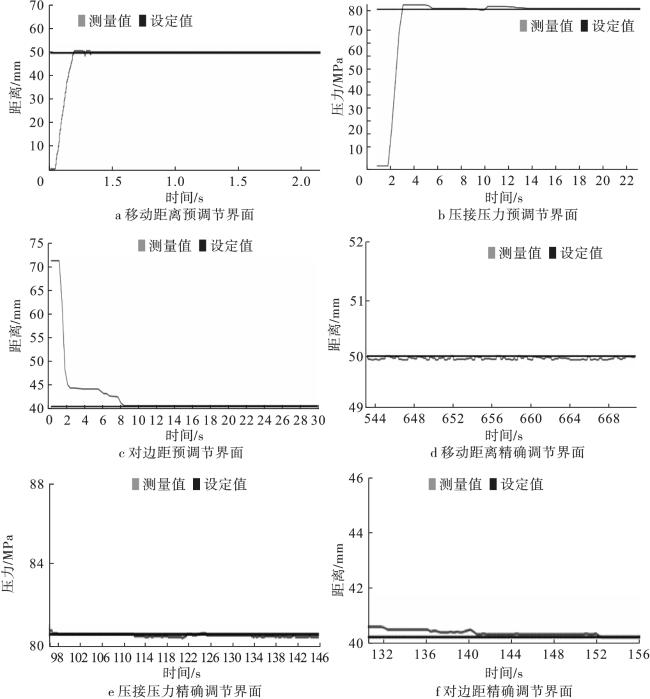
由图3对比可知,加入模糊PID控制过程比普通PID控制算法的响应速度更快,运行时间更短,且模糊PID几乎无超调量,保证系统稳定无抖动现象的发生。
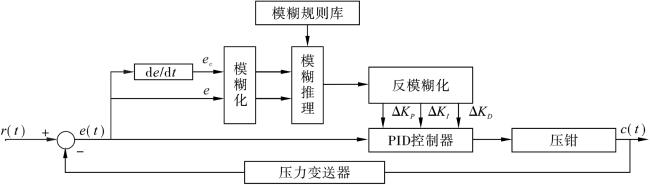
在本系统中,设定值为 ,传感器检测当前值为 ,以误差 和相应的误差变化 为输入变量,以修正量 为输出变量。传感器获取当前值,然后将此值与设定值比较得到误差和误差变化量,将误差和误差变化量的精确量进行模糊量化变成模糊量,用相应的模糊语言表示。此时根据模糊规则库将转换后的模糊语言进行模糊推理,最后将模糊量反模糊化,转换成精确量,得到在线修正的 ,并将它们分别输入至控制器中。
本文采用重心法进行解模糊化,将模糊控制量中的元素和其对应的隶属度相乘并求和,再与对应的隶属度相除[11]。计算公式如式(1) 所示。
式中: 为反模糊化的精确值; 为模糊变量元素; 为对应元素 的隶属度。
在输电线路自动压接系统中,最后计算出的 值是修正之后的,是由原来的 和修正值 相加求和而得,关系如式(2) 所示。
3 基于博途SCL语言的模糊PID算法实现
本文借助博途平台提供的SCL语言进行模糊PID的算法设计,该语言可使来自压力变送器的压力变量以编程语言的方式直接读取、调用及参与公式计算,具备循环、数组等高级语言编程的特点[12]。
3.1 量化因子
3.2 隶属函数的确定
本次隶属度函数采用三角函数的形式,将确定的隶属函数曲线离散化,得到有限个点上的隶属度,构成了一个相应的模糊变量的模糊子集[15]。三角形隶属函数参数计算关系如式(5) 所示。
三角隶属度函数的输入参数(a、b、c分别代表3角形的3个顶点)在此采用结构类型变量存储,在PLC里定义数组变量,数组元素类型为结构类型变量,这样可以一次性遍历输出所有的三角隶属度值。由IF...ELSIF...ELSE...END_IF语句判断变量当前的隶属度。
3.3 模糊规则制定
在博途PLC控制器中,模糊规则采用2维数组的形式进行存储,在主程序中可调用并根据本模块进行下一步的模糊推理。 的模糊控制规则如表1-3所示。
表1 模糊控制规则表 |
| e | |||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS |
| NS | PM | PM | PM | PS | ZO | NS | NS |
| ZO | PM | PM | PS | ZO | NS | NM | NM |
| PS | PS | PS | ZO | NS | NS | NM | NM |
| PM | PS | ZO | NS | NM | NM | NM | NB |
| PB | ZO | ZO | NM | NM | NM | NB | NB |
表2 模糊控制规则表 |
| e | |||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | NB | NB | NM | NM | NS | ZO | ZO |
| NM | NB | NB | NM | NS | NS | ZO | ZO |
| NS | NB | NM | NS | NS | ZO | PS | PS |
| ZO | NM | NM | NS | ZO | PS | PM | PM |
| PS | NM | NS | ZO | PS | PS | PM | PB |
| PM | ZO | ZO | PS | PS | PM | PB | PB |
| PB | ZO | ZO | PS | PM | PM | PB | PB |
表3 模糊控制规则表 |
| e | |||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PS | NS | NB | NB | NB | NM | PS |
| NM | PS | NS | NB | NM | NM | NS | ZO |
| NS | ZO | NS | NM | NM | NS | NS | ZO |
| ZO | ZO | NS | NS | NS | NS | NS | ZO |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO |
| PM | PB | NS | PS | PS | PS | PS | PB |
| PB | PB | PM | PM | PM | PS | PS | PB |
将误差和误差变化两个变量进行模糊化处理,通过隶属度函数来计算误差及误差变化的隶属度,保存非零隶属度及其个数,将数组中的无效模糊子集的索引位置填充为0。
3.4 解模糊
在系统运行过程中, 时刻的控制量为 ,如式(6) 所示。
时刻的控制量为 ,如式(7) 所示。
求取其单位增量 ,如式(8) 所示。
最终整理求得 ,如式(9) 所示。
求得最终输出,如式(10) 所示。
根据上述模糊结论,采用SCL语言的形式求解输出变量的具体数值。
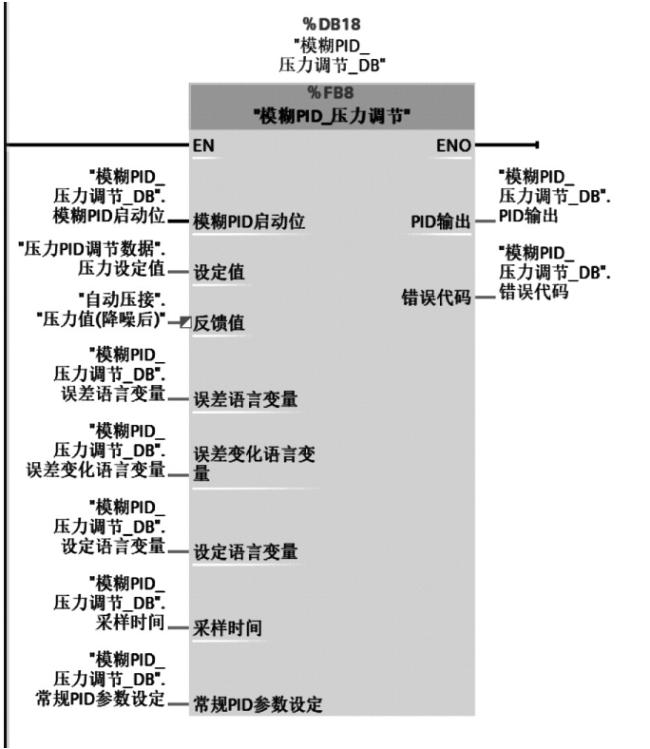
3.5 模糊PID算法的模块封装
4 输电线路自动压接系统实验结果
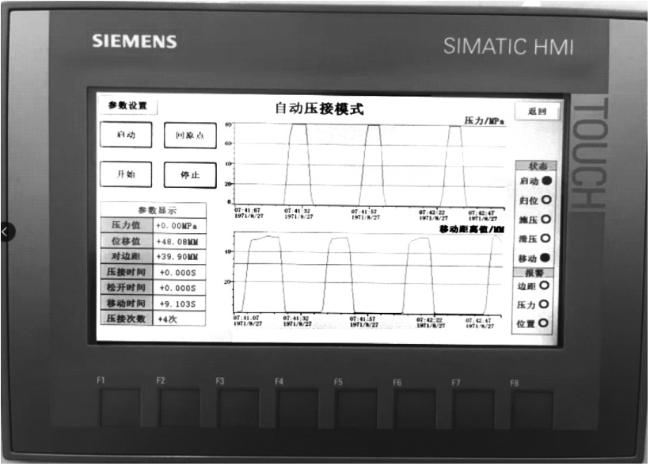
输电线路自动压接系统的监控界面可显示当前压接导线压力值、压接时间、导线对边距、压接次数、滑台移动距离值、滑台当前移动时间及压接状态。HMI视图如图6所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5 结论
本文下位机采用S7-1200控制器,上位机采用HMI进行人机交互,实现自动切线、自动剥线、自动移动导线、自动压接导线、自动测量导线对边距等功能。在博途平台中实现对导线压接的模糊PID控制,可根据系统运行中的反馈动态调整控制策略,相比于传统PID,提高了导线压接精度、缩短了压接时间,为输变电工程提供了必要的技术支持。