

刮板捞渣机是水煤浆气化排渣系统中的重要组成部分。在生产过程中,刮板捞渣机可以保证除渣的效率、清洁性,有效地满足装置生产、排渣的实际需要。刮板捞渣机作为电厂生产线中极其重要的一环,其运行状态直接决定了电厂能否安全、高效地生产。因此,对捞渣机状态进行实时监测很有必要。
目前,电厂中捞渣机的状态监测主要是依靠专人定时巡检完成。当发现捞渣机出现异常情况(如:刮板与环链的连接出现断裂、捞渣机刮板严重磨损)时进行更换和检修[1]。这种依靠大量人力和物力的人工检测方式既耗时又费力。随着计算机视觉技术的不断发展,在电厂关键设备异常检测中逐步引入基于机器学习的异常检测方法,能够有效检测设备状态。在针对电厂漏水、漏油检测方法的研究中,巩宇等[2]在原始的YOLOv3网络基础上,提出一种多尺度特征融合的改进网络,通过提取浅层网络中更多的细粒度和深层网络中更丰富的语义信息,实现漏水、漏油目标检测,提高了模型的鲁棒性;同时在检测网络中引入Inception结构,减少模型参数量,增加网络的深度和宽度,能较好地满足电厂中漏水、漏油检测的精度和实时性要求。在针对电厂输送带设备的跑偏检测方法的研究中,胡江迪[3]在基于语义分割网络的跑偏检测方法中,选用PSPNet模型实现输送带图像的目标分割,并通过深度学习训练得到分割后的特征图像,最后选取不同运行状态特征的输送带图像对该检测方法进行了验证。在针对电厂刀闸设备异常检测中,尤振飞等[4]提出了一种基于语义分割与连通区域标记的隔离开关异常状态检测方法。通过使用语义分割算法提取隔离开关像素,然后使用区域生长算法的语义分割图像标记方法实现对隔离开关连通区域的标记,利用面积排序统计方法优化面积阈值并消除非开关臂的区域。最后通过引入风格迁移算法生成隔离开关风格化图像增强训练集,提升污损图像中隔离开关定位、分割的准确性。以上基于视觉的电厂关键设备检测方法均得到成功应用。
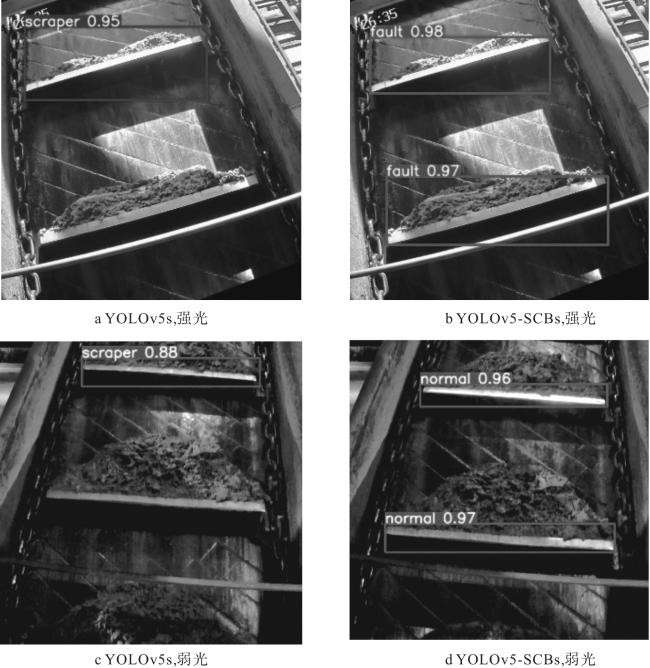
当捞渣机状态出现异常时,最直观的表现形式为刮板出现倾斜,因此将捞渣机刮板作为检测目标,根据其倾斜角度来判断捞渣机设备状态。电厂捞渣机常部署在露天环境下,现有的机器视觉检测算法易被光照变化所影响,尤其是正午阳光直射和傍晚光照强度不高时,检测算法鲁棒性不高。针对这一难题,本文以YOLOv5s网络为基础模型,首先,从网络轻量化和加快推理速度的角度引入ShuffleNet[5]和SIoU[6]损失函数对原有模型进行改进;其次,考虑到捞渣机刮板具体的长条形状特性,引入改进的条形池化通道和空间注意力机制模块[7] (convolutional block attention module,CBAM);最后,引入加权双向特征金字塔网络[8](bidirectional feature pyramid network,BiFPN)弥补网络轻量化造成的检测精度下降的问题,达到精度与速度的平衡;最终建立YOLOv5s-SCB模型,用于电厂捞渣机的异常状态实时精准检测。
1 捞渣机刮板异常检测模型设计
电厂中关键设备种类繁多,实际生产中,电厂的关键设备实时监测对于异常监测算法的精度和检测速度均有较高的要求。本文提出了改进YOLOv5s的轻量化检测算法YOLOv5s-SCB,从多个方面降低模型的网络参数,加快模型的推理速度,增强模型的检测精度。
1.1 网络结构模型设计
改进的网络模型YOLOv5s-SCB结构如图1 所示。
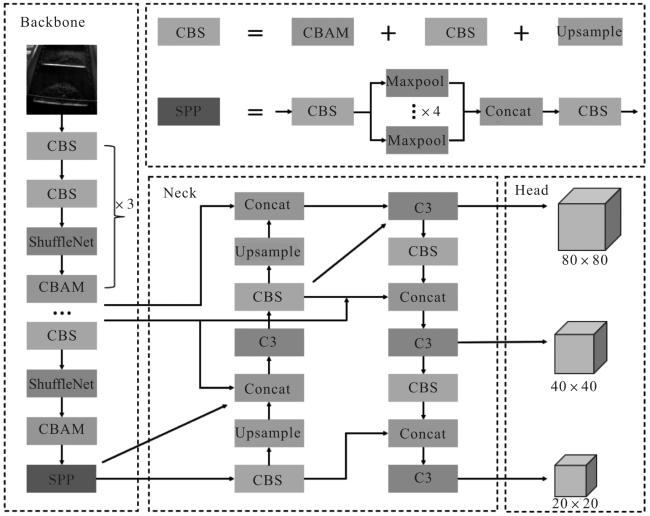
在图1 中,YOLOv5s-SCB分为3个模块,其中Backbone模块是对捞渣机刮板输入图像进行特征提取;Neck模块对获取的捞渣机刮板特征图进行特征融合;Head模块进行回归预测。首先,YOLOv5s-SCB在特征提取网络Backbone中引入ShuffleNet,替代原YOLOv5s的主干网络CSPDarknet进行特征提取,同时采用改进的混合注意力机制CBAM从通道和空间两方面获取更为有效的特征,进一步提高模型对关键信息的特征提取能力;其次,在特征融合Neck中融入BiFPN网络进行特征加强提取,获取更为丰富的特征信息,进一步提高检测能力;最后,在输出端Head使用SIoU函数计算回归损失,提升模型的收敛性能。
1.2 ShuffleNet网络
在主干网络特征提取时,YOLOv5s初始模型容易丢失小目标的特征信息,对小目标的检测效果有所降低,并且其网络模型体积较大、参数多、对硬件要求较高,对部署造成一定的困难[9]。针对以上情况,本文在YOLOv5s网络的基础上采用轻量化的ShuffleNet代替原主干网络,减少网络参数,实现模型的轻量化。
ShuffleNet提出了通道混洗(channel shuffle,CS)的操作。通过将分组卷积得到输出特征的不同通道信息均匀打乱,在不增加计算量的情况下,保证分组卷积之后不同组的特征图之间实现特征通信,增强特征提取效果[10],ShuffleNet基本模块如图2 所示。
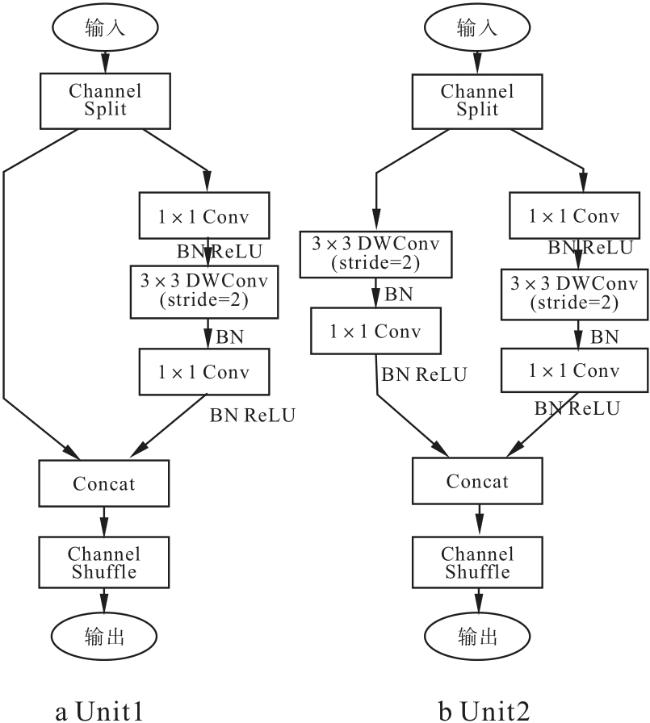
Unit1中将输入通道数划分为两支,左侧分支不作处理,右侧分支进行卷积操作和批量归一化等处理,再将左侧分支的通道特征与右侧分支输出特征进行特征融合后进行通道混洗,从而加强了对通道的信息融合能力。Unit2左右两侧分支均作降采样处理,特征图大小减半,维数加倍, ShuffleNet网络结构由这两个单元共同组成,实现轻量化特征提取。
1.3 改进的CBAM注意力机制
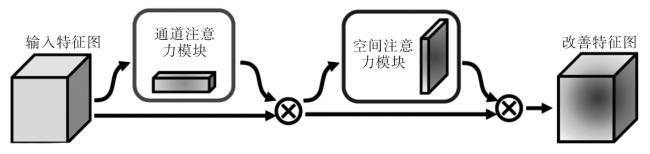
CBAM注意力模块属于混合域注意力模块,能够加强网络模型对关键特征信息的空间定位能力[11],模块结构如图3 所示。CBAM模块是由通道注意力机制与空间注意力机制串联组成。通道注意力模块对输入特征图在通道维度上进行最大池化和平均池化,然后将这两个池化结果输入到一个全连接层中,最后输出一个通道注意力权重向量。这个向量用于加权输入特征图中的每个通道,从而更好地区分不同通道的特征。通道注意力模块用于计算每个通道的重要性,以便更好地区分不同通道之间的特征。空间注意力模块对输入特征图在通道维度上进行平均池化和最大池化,然后将这两个池化结果输入到一个全连接层中,最后输出一个空间注意力权重张量。这个张量用于对每个像素在空间上进行加权,从而更好地捕捉图像中的空间结构。空间注意力模块用于计算每个像素在空间上的重要性,以便更好地捕捉图像中的空间结构。计算公式为
式中: 为输入特征图,为Sigmoid激活函数; 为7×7的卷积运算; 、 分别为平均池化和最大值池化; 、 则分别为输入特征图的平均池化特征和最大值池化特征。
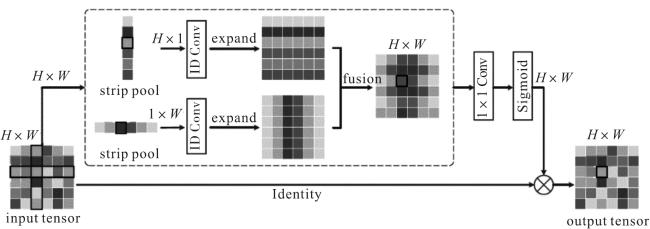
考虑到捞渣机刮板的形状特性为狭长的长条形,将条形池化[12]引入到CBAM结构(图3 所示)中。作为其他池化的替代方案,条形池化有两个优点:其沿着一个空间维度部署一个长条状的池化核形状,因此能够捕获孤立区域的长距离关系;在其他空间维度上保持较窄的内核形状,便于捕获局部上下文,防止不相关区域干扰标签预测。实际上,相较于将最大池化和平均池化都替换掉,仅将最大池化替换掉的效果更好,图4 为条形池化的过程。
1.4 特征融合网络BiFPN
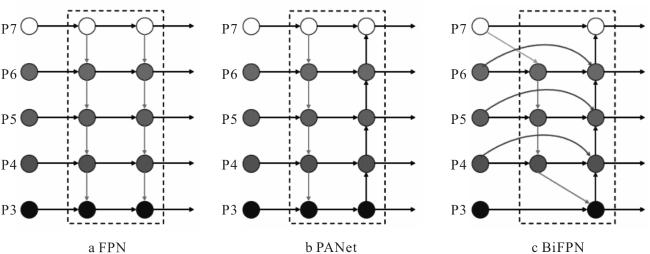
YOLOv5s采用PANet[13]进行特征融合,采用自上而下和自下而上构建不同尺度特征层的方式进行信息融合。通过不同感受野的特征融合,使网络充分提取各个层次的特征,从而得到更为丰富的特征信息。为进一步研究高效的多尺度特征融合方式,达到更好的目标检测效果,本文改进特征融合层的连接方式,引入BiFPN网络进行特征融合。BiFPN网络通过自下而上和自上而下的特征传播方式,将低层特征和高层特征进行融合。具体来说,自下而上路径通过上采样和特征融合将低层特征传播给高层,自上而下路径通过下采样和特征融合将高层特征传播给低层。在双向特征传播过程中,BiFPN网络采取了一系列特征融合操作,包含特征相加和特征加权融合,以获得更有效的特征表示。BiFPN网络将融合后的特征图进行尺度和通道调整,得到多尺度的特征输出。Neck层网络结构如图5 所示。
1.5 损失函数改进
YOLOv5s的损失函数由矩形框损失 、置信度损失 和类别损失 3部分组成,如式(2) 所示

式中: 为传统回归损失; 为距离损失; 为形状损失。
引入了真实框和预测框之间的向量角度计算,可加速网络模型的收敛。
2 数据样本采集与预处理
2.1 捞渣机刮板数据
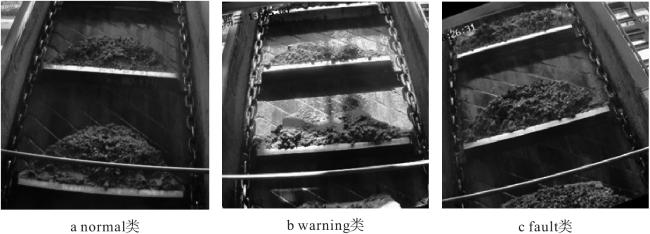
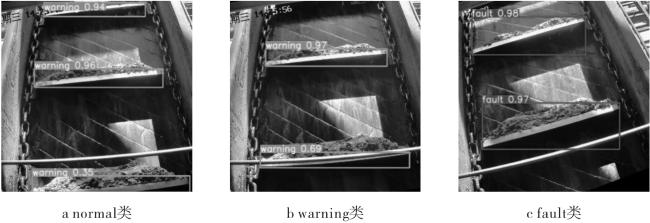
采集捞渣机刮板图像数据共计7 200幅,对捞渣机刮板图像数据集进行清洗和增强处理,如图6 所示。按照捞渣机刮板倾斜角度将其分为3类:倾斜角度在0~10°范围内为normal类,倾斜角度在10°~20°范围内为warning类,倾斜角度在20°以上为fault类。其中,normal类图像数据2 400幅、warning类图像数据2 400幅、fault类图像数据2 400幅。
2.2 数据增强
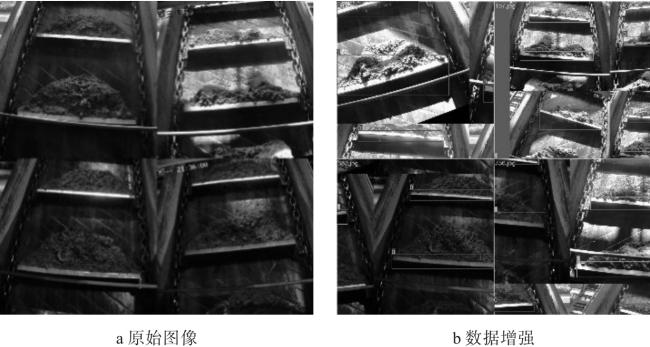
数据集采用传统图像增强和马赛克数据增强相结合的方法,增加了捞渣机刮板图像样本的多样性,提高了模型的泛化能力和鲁棒性。选择4幅捞渣机刮板数据图像进行马赛克增强,马赛克增强实验结果如图7 所示。
2.3 数据标注
为了提高捞渣机刮板检测输出的准确性,使网络模型能够学习到捞渣机刮板的特征与位置信息,需要对数据图像中的捞渣机刮板进行标注。使用标注软件Labelimg工具制作VOC格式数据集,文件中包含捞渣机刮板类别信息和位置信息。图像数据和标注文件用于模型的训练和验证。
3 改进模型检测结果与分析
3.1 实验环境
计算环境为Window10操作系统,硬件配置CPU为i5-12450,GPU为RTX2060-12g,32GB运行内存。模型训练环境为PyTorch 1.11.0、Python 3.8和Cuda 11.3。训练参数为300轮次,Batch-size为8,图像输入分辨率为640像素×640像素,其他使用原始默认参数。总数据图像7 200幅,按7:1:2比例随机划分数据集,其中训练集5 040幅、验证集720幅、测试集1 440幅。
3.2 捞渣机刮板数据集测试结果与分析
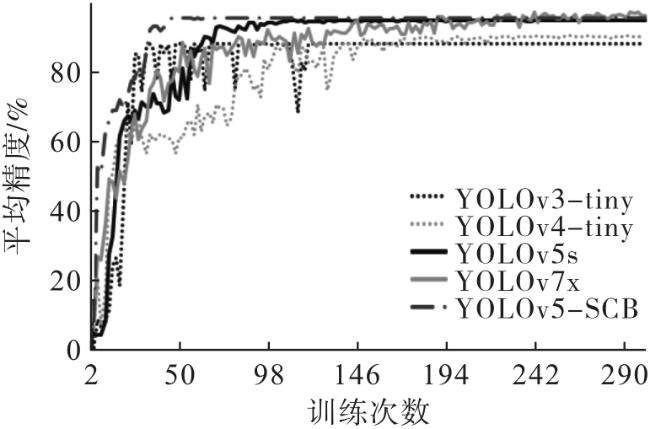
从图8 可以看出,改进模型YOLOv5s-SCB的平均精度明显优于YOLOv3-tiny、YOLOv4-tiny、YOLOv5s。尽管YOLOv5s-SCB 平均精度比YOLOv7x模型略低一点,但在训练过程中改进模型的收敛效果更好。
为了测试不同IOU阈值对于检测模型性能的影响,设置IoU阈值从0.9降低到0.1,精确率P(precision)的变化情况如表1 所示。
表1 不同IoU阈值下的 P 值 |
| IoU阈值 | 0.9 | 0.7 | 0.55 | 0.5 | 0.45 | 0.4 | 0.3 | 0.1 |
|---|---|---|---|---|---|---|---|---|
| P/% | 89.9 | 91.4 | 92.9 | 93.6 | 94.8 | 94.6 | 94.2 | 94.2 |
从表1 可以看出,适当降低IoU阈值(从0.9降低到0.45),可以有效提升检测精确率;进一步降低IoU阈值(从0.45降低到0.3),会导致检测结果出现过多的假阳性,从而造成误检。当IoU阈值在0.45附近时,精确率最大,模型性能最好。
根据上述结论,重新设置IoU阈值为0.45,改进模型YOLOv5s-SCB与其他模型识别精度和性能实验结果如表2 所示。
表2 网络模型识别精度和性能比较 |
| 网络模型 | P/% | R/% | F1/% | mAP/% | 体积/MB | 检测时间/ms |
|---|---|---|---|---|---|---|
| YOLOv3-tiny | 86.1 | 84.4 | 85.2 | 88.1 | 36.6 | 31.1 |
| YOLOv4-tiny | 91.7 | 89.5 | 90.6 | 90.6 | 23.1 | 36.3 |
| YOLOv5s | 93.2 | 93.4 | 93.3 | 92.9 | 14.5 | 21.9 |
| YOLOv7x | 93.8 | 95.2 | 94.0 | 95.4 | 142.1 | 16.2 |
| YOLOv5s-SCB | 94.8 | 95.5 | 95.1 | 95.1 | 12.3 | 9.2 |
由表2 可见,与YOLOv5s相比,YOLOv5s-SCB精确率提高1.6%,召回率提高2.1%,平均精度均值提高2.2%,模型体积下降了15.2%,检测时间下降了58.0%。在模型体积下降的情况下,YOLOv5s-SCB精度和性能仍然优于YOLOv5s;与YOLOv3-tiny相比,YOLOv5s-SCB精确度提高8.7%,召回率提高11.1%,平均精率均值提高7.0%,模型体积下降了66.4%,检测时间下降了70.4%;相比于YOLOv4-tiny,YOLOv5s-SCB精确率提高3.1%,召回率提高6.0%,平均精度均值提高4.5%,模型体积下降了46.6%,检测时间下降了74.7%;与YOLOv7x相比,尽管YOLOv5s-SCB平均精度均值下降0.3%,但YOLOv7x模型体积巨大,且改进模型YOLOv5s-SCB的精确率、召回率、综合评价指标和推理时间更优。综合来看,改进的模型YOLOv5s-SCB的性能均优于YOLOv3-tiny、YOLOv4-tiny、YOLOv5s、YOLOv7x。
3.3 消融实验及分析
为验证改进模型YOLO v5s-CBD 的有效性,以YOLOv5s作为基线模型,分别将ShuffleNet、CBAM、BiFPN、SIOU模块插入到YOLOv5s网络中,采取控制变量的方法研究各个方法在YOLOv5s网络上的改进效果。使用精确率、召回率、平均精度均值、模型体积和检测时间作为评价指标。消融实验1验证结果如表3 所示。
表3 消融实验1验证结果 |
| 网络模型 | P/% | R/% | mAP/% | 模型体积/MB | 检测时间/ms |
|---|---|---|---|---|---|
| YOLOv5s | 92.0 | 91.5 | 92.1 | 14.5 | 16.3 |
| YOLOv5s+ ShuffleNet | 89.0 | 90.0 | 91.2 | 7.9 | 8.6 |
| YOLOv5s+ CBAM | 96.8 | 96.2 | 94.8 | 15.1 | 17.2 |
| YOLOv5s+ BiFPN | 97.4 | 96.0 | 95.2 | 14.8 | 18.8 |
| YOLOv5s+ SIoU | 92.6 | 93.8 | 93.8 | 14.5 | 15.5 |
从表3 中可以看出,单独增加ShuffleNet网络,模型精确率下降了3%,召回率下降了1.5%,平均精度均值下降了0.9%,但是模型体积降低了45.5%,检测时间下降了47.2%,说明采用ShuffleNet网络,牺牲掉少量精确率的情况下能够显著降低模型参数量,加快模型推理速度; 单独增加CBAM模块,模型精确率提高了4.8%,召回率提高了4.7%,平均精度均值提高了2.7%,模型体积略微增加,检测时间增加了0.1%,说明采用CBAM模块可以显著提高网络模型的精确率,但模型的推理速度会略微变慢;单独增加BiFPN网络,模型精确率提高了5.4%,召回率提高了4.5%,平均精度均值提高了3.1%,模型体积基本不变,检测时间增加了15.3%,说明采用BiFPN网络可以提高网络模型的精确率,但模型的推理速度会变慢;单独增加SioU函数,模型精确率提高了0.6%,召回率提高了2.3%,平均精度均值提高了1.7%,模型体积不变,检测时间基本不变,说明采用SioU函数可以略微提高网络模型的精确率,但模型的推理速度无明显提升。
为进一步客观评估改进模型YOLOv5s-SCB的性能,将ShuffleNet、CBAM、BiFPN、SIOU模块依次累加到YOLOv5s网络中,消融实验2验证结果如表4 所示。
表4 消融实验2验证结果 |
| 网络模型 | ShuffleNet | CBAM | BiFPN | SIoU | P/% | R/% | mAP/% | 模型体积/MB | 检测时间/ms |
|---|---|---|---|---|---|---|---|---|---|
| 1 | × | × | × | × | 92.0 | 91.5 | 92.1 | 14.5 | 16.3 |
| 2 | √ | × | × | × | 92.4 | 92.0 | 91.2 | 7.9 | 8.6 |
| 3 | √ | √ | × | × | 93.5 | 92.2 | 93.7 | 10.3 | 9.0 |
| 4 | √ | √ | √ | × | 94.5 | 91.5 | 94.6 | 12.3 | 11.4 |
| 5 | √ | √ | √ | √ | 94.8 | 91.5 | 95.1 | 12.3 | 9.2 |
由表4 可知,相比于YOLOv5s,模型2的精确率、召回率和平均精度均值虽然都有略微下降,但模型体积降低了45.5%,检测时间下降了47.2%,说明采用ShuffleNet网络,能够显著降低模型参数量,加快模型推理速度;相比于模型2,模型3的精确率提高1.1%,召回率提高0.2%,平均精度均值提高1.4%,说明使用CBAM可以提升对捞渣机刮板特征的提取能力,提高模型识别精度;相比于模型3,模型4的召回率虽然下降0.7%,但是精确率提高1.0%,平均精度均值提高0.9%,说明引入BiFPN能够加强对特征的提取,获取更为丰富的特征信息,进一步提高检测性能;相比于模型4,模型5的精确率提高0.3%,平均精度均值提高0.5%,检测时间下降了19.3%,说明使用SIoU可以提高模型的拟合,加快模型收敛速度,提高模型识别精度。
为深入测试改进模型前后的性能,训练300个迭代周期后,得到改进模型YOLOv5s-SCB和YOLOv5s的位置损失对比,如图9 所示。
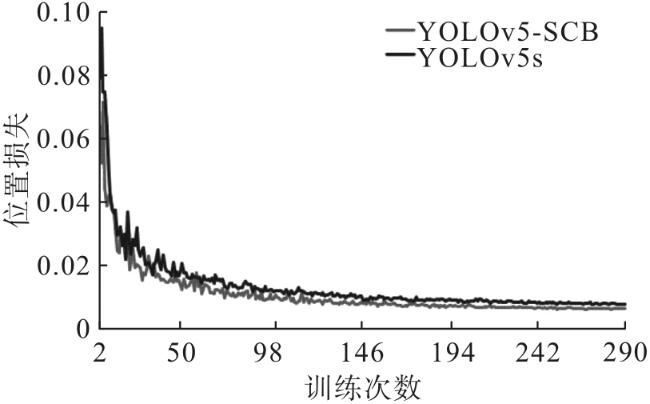
由图9 可知,由于改进模型YOLOv5s-SCB引入了BiFPN、CBAM注意力机制和SIoU,收敛更快且收敛性能优于YOLOv5s。
3.4 检测结果
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
4 结论
针对电厂生产作业现场光照条件差、背景复杂这一现状,且采用YOLO系列检测算法存在模型参数量较大、识别精度低等问题,提出了一种复杂光照背景下轻量化目标检测识别模型YOLOv5s-SCB,该模型引入ShuffleNet实现网络轻量化,加快模型推理速度;使用增加条形池化的CBAM和BiFPN改进特征提取网络,提高模型检测精度;采用SIoU提高模型收敛能力,提升模型检测能力。在对电厂捞渣机刮板检测时,改进模型YOLOv5s-SCB识别精确率P为94.8%,召回率R为95.5%,综合评价指标F1为95.1%,平均精度均值mAP为95.1%,模型体积为12.3 MB,检测时间为9.2 ms。与YOLOv3-tiny、YOLOv4-tiny、YOLOv5s模型相比,改进模型YOLOv5s-SCB具有更好的检测性能。