

导线压接质量的好坏直接关系到电网运行的安全性、规范性[1]。常规导线一般是由钢线和铝线绞合而成,导线内部是钢芯,铝线缠绕在钢芯的外部。传统导线的压接过程是由人工控制液压泵,驱动压接钳进行压接,需要人工将导线一模一模地移动并测量压接后六边形导线3组对边距以及导线移动的距离。人工压接导线存在压接后导线直线度达不到工程标准、凹凸槽处漏压或者过压、压接叠模不均匀等一系列的问题,对工人的技术水平和责任心要求较高[2]。因此,改进输电导线压接工艺、提高压接质量是目前电网建设亟待解决的问题。
国外对输电线路导线压接的研究多数是基于导线材料的选择与新型材料的设计,如2015年,克拉约瓦大学电气工程学院提出了一种针对压接技术的新的质量预控解决方案,通过降低接触电阻和增加接触面积来实现连接可靠性,从而提高压接质量[3]。2018年,为了克服常规压接中出现的问题,印度理工学院机械工程系提出了一种利用强脉冲电磁场作用于铝端子与铜线的压接新技术,但成本较高,很难应用于工业生产[4]。同年,弗卢米嫩塞联邦大学工学院通过使用铝导体复合芯代替最常见的导体铝增强钢,提出一种技术替代方案[5]。同年,纽伦堡大学自动化和生产系统研究所提出了智能超声压接的设计概念,将ML算法应用到电驱动控制中[6]。
目前,国内导线压接技术研究也取得了一些可借鉴的成果。2017年,国网山东送变电工程公司在传统导线压钳的基础上,以S7-200可编程逻辑控制器为主控器设计了一种自动导线压接系统,但尚未见应用报道[7]。2020年,辽宁省送变电工程有限公司设计出一种PLC为主控制器的输电导线自动压接系统,并应用于实际生产当中[8]。2020年,薛光辉等[9]将DDVC技术引入到导线压接设备当中,仿真结果显示导线的压接精度有所提高。2021年,董晓虎等[10]对大截面钢芯铝绞线导线压接拉断进行了仿真分析,分析结果可为导线压接工艺优化参数提供参考。
本文在原有PLC为控制器的输电导线自动压接系统的基础上,设计一种以STM32单片机作为主控制器的导线自动压接控制系统,可解决原有PLC控制系统笨重、不利于线上压接、成本较高等问题。在控制方法上,本文提出一种基于LabVIEW上位机的模糊PID控制系统,该控制方法解决了常规PID控制鲁棒性弱、参数难以整定等问题[11]。改进后的输电导线自动压接设备与传统人工操作压接设备相比,降低了劳动强度,提高了工作效率。
1 导线自动压接系统工作原理
本文设计的导线自动压接系统以单片机为下位机,LabVIEW设计的工业监控界面为上位机。系统组成包括5个模块:主控制器模块、导线的自动测量模块、自动移动模块、自动压接模块、LabVIEW上位机监控系统模块。主控制器模块使用STM32单片机来控制压接设备,导线的自动测量装置模块能够自动测量压接完成后六边形导线对边距的尺寸。导线的自动移动模块使导线可以自动按模位移动。导线的自动压接模块能够自动进行导线的压力控制。LabVIEW上位机监控系统模块显示下位机传递的数据以及下位机数据的发送,具体工作原理如图1 所示。

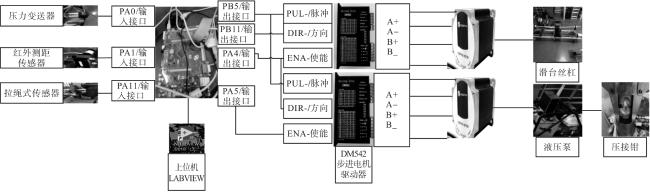
自动移动装置模块选用的硬件设备有滑台、86两相步进电机、丝杠、DM542步进电机驱动器。自动测量装置模块选用的硬件设备有AS-131压力变送器测量压力、WXY33抽绳位移传感器测量导线移动的距离、红外测距传感器GP2YOA21YKOF测量压接后六边形导线对边距。自动压接装置模块选用的硬件设备有液压泵、SY-J-2000/80-A液压钳、57步进电机、DM542步进电机驱动器、夹持器、伸缩杆。主控制装置模块的硬件设备为STM32F103ZET6芯片、ST-LINK仿真器、USB转串口数据线以及MP2359同步降压型转换器。除此之外还需要继电器控制负载电流,系统硬件组成如图2 所示。
单片机与LabVIEW进行通信,首先应该配置VISA的资源名称,配置波特率为9 600 bit/s、校验位为0、数据位为8、停止位为0。其中波特率、校验位、数据位、停止位信息应和下位机一一对应,否则串口通信会失败[12]。对于自动压接模块,发送内容为直径、时间、次数、距离,串口发送的数据格式为帧头+压力值+直径值+帧尾,具体内容为0XA5+0000+0000+0X5A;接收到的数据显示为数据1和数据2,分别对应的值为压力值和直径值。单片机采取的硬件通信协议为RS485协议,通信时应注意单片机的RXD引脚(或 TXD)对应连接串口的TXD(或RXD)引脚。上位机进行串口通信和规定协议通信如图3 所示。

2 导线自动压接模糊PID控制
2.1 模糊PID控制器设计
为提高导线压接精度,提出一种模糊PID的控制方法来对导线自动压接系统进行控制。智能模糊PID自动压接控制系统如图4 所示。
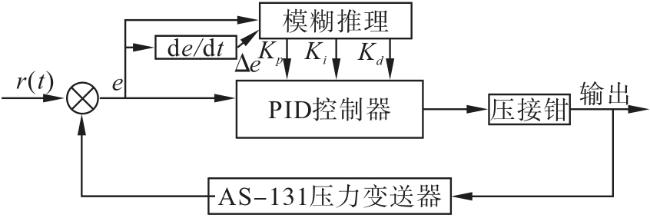
控制系统中AS-131压力变送器传输的压力值为采集值,设置为P pv,压接钳压接导线的压力值设置为P sp。将压力信号的误差量e(P sp-P pv)和误差变化率Δe(de/dt)作为模糊PID控制器的输入,选用三角形隶属度函数对输入量e和输入量Δe进行模糊化。模糊论据的范围为{-3、-2、-1、0、1、2、3},模糊子集为{NB、NM、NS、ZE、PS、PM、PB},分别对应{负大、负中、负小、零、正小、正中、正大}。使用模糊规则实时在线修改PID参数,根据误差量e和误差变化率Δe在不同时刻对PID参数进行整定,实现液压泵输出压力值与导线压接精度需求相匹配,从而使被控对象达到良好的动态性能,进而实现高精度压接控制。
2.2 模糊控制规则的建立
从导线自动压接系统超调量、响应时间、稳定性等方面进行分析,可以得出系统的输入e、 与输出Kp 、Ki 、Kd 之间存在如下对应关系:
(1)在自动压接系统运行初期,电机驱动液压泵进行压接工作,通过压力变送器采集压力值,此时输入e较大,通过大幅度增加Kp 值来增大压力响应速度,但Kp 值调节的压力应小于设定的压力。为了避免超调量的出现,此时应调节较小的Kd 值,或直接消除Ki 值,使Ki=0。
(2)在自动压接系统运行中期,采集到的压力值基本可以达到设置的最大压力值。此时的2个输入误差和误差变化率基本相等,压接系统并不需要大幅度调节Kp 值,只需要小幅度调节Kp 值,并且适当地调节Ki 值和Kd 值,保持一定响应速度的同时把超调量降到最小。
(3)在自动压接系统运行后期,此时输入e较小,为防止压接机剧烈抖动或突然停止损坏机器,此时需要较小的Kp 值和Kd 值来保持自动压接系统的稳定性。
依此进行模糊控制的规则建立,如表1 ~3 所示。
表1 Kp 的模糊规则表 |
| /e | NB | NM | NS | ZO | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS |
| NS | PM | PM | PM | PS | ZO | NS | NS |
| ZO | PM | PM | PS | ZO | NS | NS | NM |
| PS | PS | PS | ZO | NS | NS | NM | NM |
| PM | PS | ZO | NS | NM | NM | NM | NB |
| PB | ZO | ZO | NM | NM | NM | NB | NB |
表2 Ki 的模糊规则表 |
| /e | NB | NM | NS | ZO | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| NB | NB | NB | NM | NM | NS | ZO | ZO |
| NM | NB | NB | NM | NS | NS | ZO | ZO |
| NS | NB | NM | NS | NS | ZO | PS | PS |
| ZO | NM | NM | NS | ZO | PS | PM | PM |
| PS | NM | NS | ZO | PS | PS | PM | PB |
| PM | ZO | ZO | PS | PS | PM | PB | PB |
| PB | ZO | ZO | PS | PM | PM | PB | PB |
表3 Kd 的模糊规则表 |
| /e | NB | NM | NS | ZO | PS | PM | PB |
|---|---|---|---|---|---|---|---|
| NB | PS | NS | NB | NB | NB | NM | PS |
| NM | PS | NS | NB | NM | NM | NS | ZO |
| NS | ZO | NS | NM | NM | NS | NS | ZO |
| ZO | ZO | NS | NS | NS | NS | NS | ZO |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO |
| PM | PB | NS | PS | PS | PS | PS | PB |
| PB | PB | PM | PM | PM | PS | PS | PB |
3 基于LabVIEW模糊PID控制算法的实现
为了在LabVIEW中实现模糊PID算法,可以利用LabVIEW自带数学公式中的脚本节点MATLAB SCRIPT与LabVIEW进行通信,从而实现模糊PID算法,但此方法对开发者的编程能力具有较高的要求[13]。也可以通过与SIMULINK双图形语言编程来完成对模糊PID的控制,但实现中需要使用NI公司中的工具包Simulation,虽然双图形语言编程非常方便,但工具包价格昂贵,增加了上位机开发的成本[14]。除此之外,开发者也可以利用LabVIEW自带的模糊逻辑控制工具包(Fuzzy Logic Toolkit)对模糊PID进行控制,该方法简单、清晰,适合进行二次开发[15],本文的模糊PID算法选取第3种开发方法。
3.1 基于LabVIEW的模糊推理系统建立
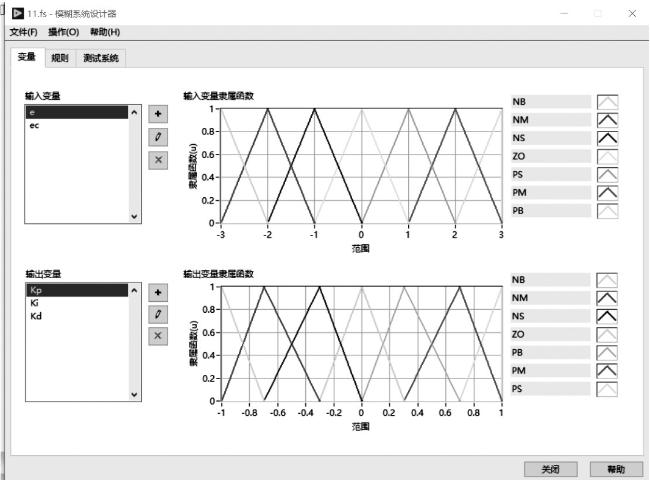
首先点击LabVIEW前面板的工具按钮,选择控制与仿真选项,在控制与仿真选项中选择模糊系统设计器进行编辑。设计的模糊PID控制器的输入为e、 ,输出为Kp 、Ki 、Kd 3个参数,隶属度函数界面如图5 所示。
模糊控制器的模糊规则按照表1 ~3 的模糊规则分别进行输入和输出的添加,按照IF-THEN的语句格式,选取面积中心法进行去模糊化,其模糊控制规则界面如图6 所示。

设置模糊控制隶属度函数界面和模糊控制规则界面之后,需要将模糊系统控制器进行保存,点击文件按钮,将设计的模糊系统控制器保存为.fs文件,以便被主程序设计中的路径调用。
3.2 模糊PID算法的LabVIEW实现
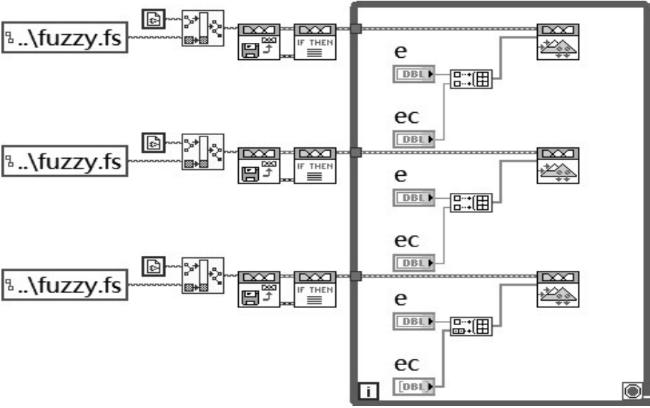
在导线自动压接过程中,压接设定最大压力值为80MPa,精度等级要求为1%。由AS-131压力变送器开始测量液压泵的压力,采集到的压力信号传送给单片机的内部进行处理。通过单片机ADC模块的第0通道开始进行AD转换,为了确保传输数据精确,本设备将ADC数值检测10次并取平均值,输出的电压信号一方面传输给串口屏直接显示,另一方面通过串口通信发送到LabVIEW上位机,并与设定压力值比较,经模糊PID控制器运算后,上位机根据偏差信号将运算结果送给单片机进行处理,由单片机驱动液压泵做出控制决策,在压力的调节过程中,同时应关注导线直径误差的大小。模糊PID算法系统子VI图如图7 所示。
4 实验结果
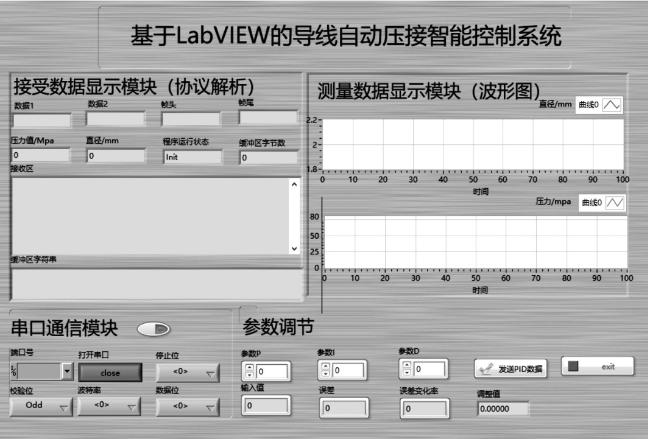
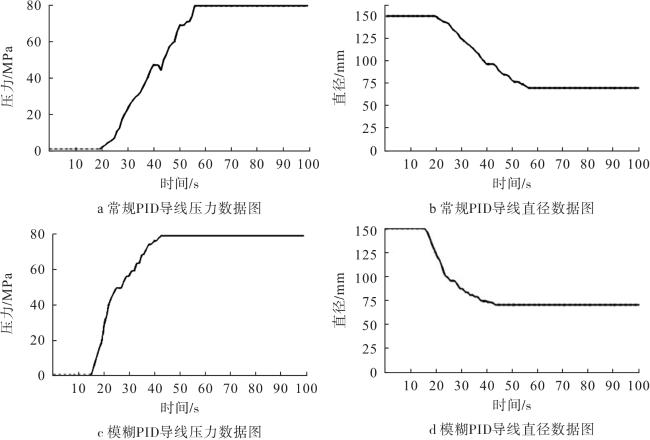
按照图2 所需硬件进行现场调试,将各个模块的硬件进行连接。采用STM32单片机采集数据,通过VISA串口、上位机LabVIEW界面显示在压接过程中导线直径与压力的变化。LabVIEW监控界面如图8 所示,压接过程压力、直径变化曲线如图9 所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
在监控界面选择端口号连接上下位机,并配置相应的校验位、数据位、停止位,布尔灯闪烁代表串口连接成功。输入与下位机匹配的帧头和帧尾即可接收数据,并通过波形图显示数据。设定导线的初始长度为150 mm,压接后六边形导线为70 mm,最大压力为80 MPa,并现场采集本文提出的基于LabVIEW的模糊PID控制方法与常规PID控制数据。通过图9 可知,应用模糊PID控制方法相较于常规PID控制方法,响应速度提升了大约5 s,压接时间缩短了12 s左右。
5 结论
本文采用STM32单片机作为下位机,LabVIEW监控系统作为上位机,对输电导线进行自动化压接,并在LabVIEW上位机中实现模糊PID控制,提高了自动化压接控制系统自适应能力和控制效果,缩短了导线压接的时间,提高了导线压接的精度,可为输电导线自动压接系统的实际工程应用提供技术支持。