

在航空航天等要求高可靠性的系统中,为提高系统可靠性,通常将系统设计成冗余结构。在传统马尔可夫并联系统可靠性评估中,假设组成系统中每个元件失效是相互独立的。如果忽略系统元件失效相关性存在,在进行系统可靠性分析时,会导致误差过大,甚至会得出错误的结论。
曹晋华等[1]对传统马尔可夫理论做了详细介绍,并给出了不同元件并联可修复系统的可靠性计算方法。梁丽丹等[2]对具有3个不同元件并联可修复系统开展了优先修理权的研究,给出了稳态指标和平均指标表达式。杨云生等[3]基于马尔可夫理论建立了舰船装备复杂系统可用度计算模型,该方法可以提高可靠性和维修性指标的综合预算精度。张振友等[4]基于马尔可夫理论,建立了考虑共因失效和载荷共享失效并联系统可靠性计算模型,但该方法仅考虑了两个元件的并联系统,且认为各元件的故障率相同。Scheuer[5]在m-out-of-n表决系统研究中提出,当系统中某个元件故障后会引起无故障元件的故障率升高。Yun等[6]研究两元件寿命为任意分布,提出一种负载分担可靠性模型。Sutar等[7]研究元件寿命服从不同分布不可修复k-out-of-m表决负载共享系统,给出系统可靠性的表达式。冯蕴雯等[8]基于载荷共享并联系统理论,应用条件概率和全概率公式对耳片结构进行可靠性建模。Asha等[9]提出两个元件负载共享模型,并给出了相关可靠性指标参数估计方法。张婧等[10]在相同元件并联可修复系统中通过引入控制器,且认为控制器寿命与元件寿命均服从指数分布,给出了可靠性评估的表达式。Bedbur等[11]研究n中取k的载荷共享对幸存部件性能造成的影响,并通过统计测试推断出元件的基本分布和载荷共享参数。Wang等[12]在并联系统中通过引入负载函数,提出一种具有故障相关性的负载并联系统可靠性模型。Zhang等[13]同时考虑共因失效和载荷分担对并联系统可靠性的影响。王琦[14] 在二态假设的条件下,基于马尔可夫过程对耦合级联失效系统进行可靠性建模,对系统耦合及状态转移过程进行分析,给出了耦合系统转移率的解析表达。
目前,在并联可修复系统可靠性分析中,已有一些研究将载荷共享引入到传统马尔可夫模型中,以解决并联系统中各元件由于载荷共享而引起的相关性问题。但这些载荷共享模型大多认为组成并联系统的各元件具有相同的故障率,且载荷共享因子需要大量试验数据进行确认,在缺乏长期统计资料的情况下,模型的使用将受到较大制约。因此,文中构建一种新的载荷共享因子,并将载荷共享因子引入到传统马尔可夫模型中,建立基于载荷共享的并联可修复系统可靠性分析模型。所建立的模型既适用于元件故障率相同又适用于元件故障率不同的并联可修复系统,在缺乏长期统计资料的情况下仍可开展可靠性评估工作。
1 载荷共享模型
1.1 载荷共享因子
假设系统中有m个元件并联,每个元件寿命均服从指数分布,且每个元件只有工作和故障两种状态,元件发生故障后只有一个维修设备。由于元件故障将导致总负载重新分配,当系统中某个元件发生故障,正常元件的故障率将发生变化。
在k状态下,若系统中故障元件个数为i,正常元件的负载正比 [14]。因此,正常元件j的载荷共享因子为
式中: 为系统在k状态下正常元件j的载荷共享因子; 为系统在k状态下正常元件j的载荷分担系数。
1.2 故障率
当并联系统在k状态时,正常元件j的故障率为
式中: 为元件j的故障率; 为k状态下元件j考虑载荷重新分配后的故障率。
由以上分析可知,载荷共享模型考虑了并联系统中各元件共同承受载荷的特点,当某个元件发生故障后,正常元件重新分担载荷,即正常元件的使用条件发生劣化,进而导致正常元件的故障率增加。
由经典可靠性理论可知,系统或元件的故障率 、稳态可用度A和平均故障间隔时间MTBF的关系表达式为
式中:MTTR为平均修复时间。
由式(3) 可知,当故障率增加时,MTBF必将减小。结合式(1) 和(2)可知,载荷分担系数越大,则故障率增加的幅度越大。因此,当考虑载荷共享时,系统的MTBF将减小,且载荷分担系数越大,MTBF减小的幅度越大。由式(4) 可知,稳态可用度和MTTR与MTBF的比值有关。在实际系统中,一般情况下MTTR小于MTBF,对于大多数实际工程系统而言,MTTR远小于MTBF,即MTTR与MTBF的比值远小于1。因此,当MTBF减小时,稳态可用度A的变化并不显著。综上,当考虑载荷共享时,因故障率增加,MTBF减小的幅度较显著;因MTTR与MTBF的比值较小,稳态可用度减小的幅度不显著。
工程实际中,并联系统大多由2个或3个元件组成,因此下文详细推导2个和3个元件并联系统的可用度和MTBF的表达式。
2 并联系统可用度及MTBF
2.1 两个元件
两个不同元件共有5个状态[15],考虑载荷共享的系统状态转移如图1 所示。
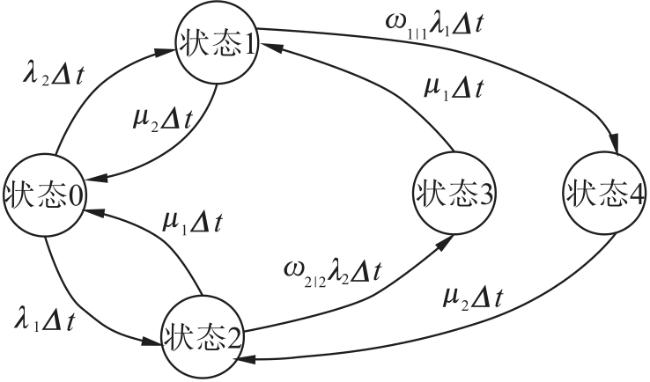
转移率矩阵为
式中:
式中: 和 分别为两个元件的故障率; 和 分别为两个元件的修复率。
式中:W为系统工作状态集;F为故障状态集; 和 为初始状态。
对式(10) 做Laplace变换和Laplace反变换可求得系统瞬时可用度 ,如式(11) 所示
求解式(12) 可求得系统的稳态可用度A,如式(13) 所示
式中: (i=0,1,…,4),分别为状态0到4的稳态分布。
的表达式为
系统MTBF为
其中, 满足式(22) 的方程组
式中: 。
求解式(22) ,得MTBF的具体表达式为
当 和 时,由文中方法给出的可用度A和MTBF与利用传统马尔可夫模型求得的表达式一致,表明文中方法可退化到经典模型。
2.2 3个元件
3个不同元件共有13个不同状态[15],转移率矩阵为
式中:
式中: 、 和 分别为3个元件的故障率; 、 和 分别为3个元件的修复率。
式中: 。
对式(29) 做Laplace变换和Laplace反变换,可求得系统瞬时可用度 ,瞬时可用度 的表达式与式(11) 相同。
系统MTBF为
其中, 满足式(31) 的方程组
式中: 。
3 算例
3.1 算例1
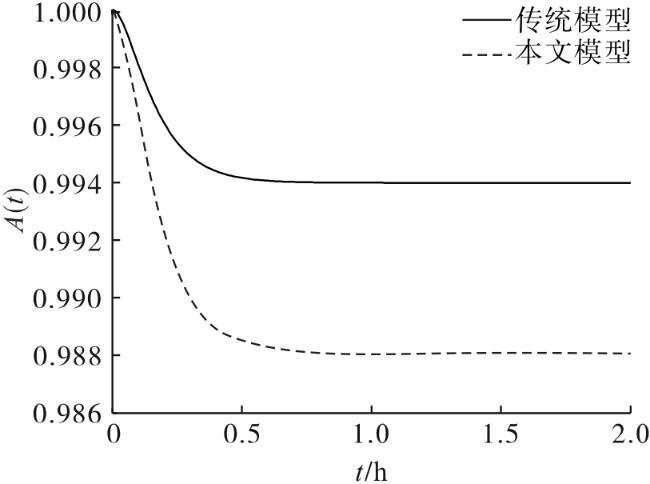
如果不考虑载荷共享对系统可靠性的影响,即 ,此时文中模型退化为传统模型;如果考虑载荷共享对系统可靠性的影响,由故障率 ,利用式(2) 求得 ,由式(1) 求得 =1.25。稳态可用度和MTBF计算结果如表1 所示,瞬时可用度变化曲线如图2 所示。
3.2 算例2
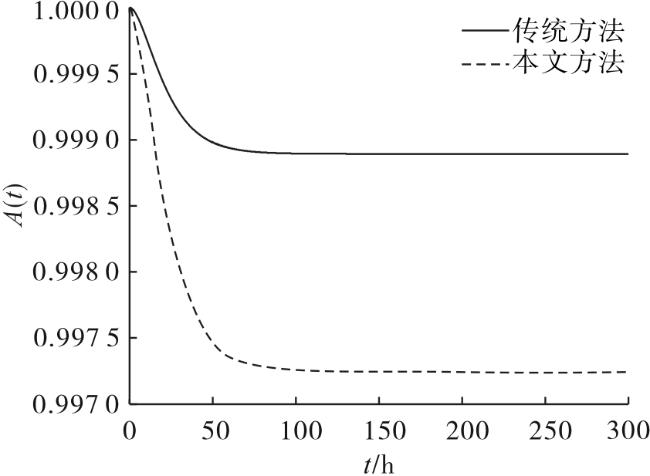
由于缺乏统计和相关试验数据,难以确定元件发生故障后剩余正常元件的故障率。因此,取载荷分担系数 =1,即 进行计算。稳态可用度和MTBF计算结果如表2 所示,瞬时可用度变化曲线如图3 所示。
从图3 可以看出,文中方法和传统方法求得的系统瞬态可用度变化趋势相同。从表2 可以看出,考虑载荷共享后的稳态可用度和MTBF均低于传统方法的计算结果,即传统方法过高地评估了系统可靠性,使系统偏于危险。
3.3 算例3
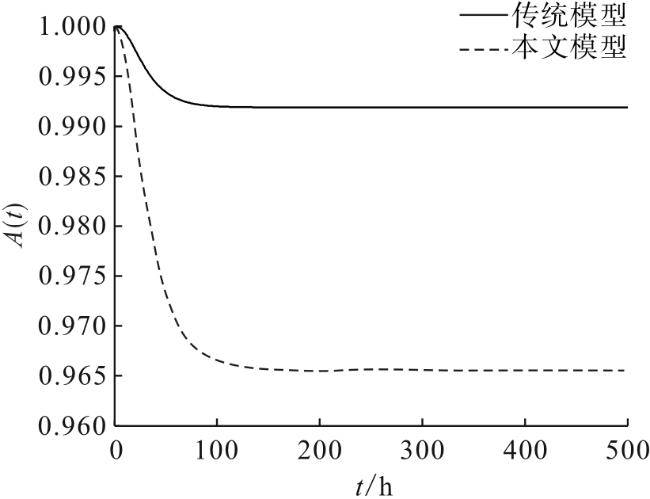
该算例共有3个元件,取载荷分担系数 =1计算,即当并联系统中某个元件发生故障后,正常元件平均分担负载。当一个元件发生故障后,由式(1) 求得剩余两个正常元件的载荷共享因子为 =1.5;当两个元件故障后,由式(1) 求得剩余一个正常元件的载荷共享因子为 =3。稳态可用度和MTBF计算结果如表3 所示,瞬时可用度变化曲线如图4 所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
从图4 中可以看出,文中方法和传统方法求得的系统瞬态可用度变化趋势相同。从表3 中可以看出,文中方法求得的可用度和MTBF均小于传统方法的计算结果。
4 结论
(1)在并联系统中,当某个元件失效后,由于负载重新分配,导致剩余正常元件的工作环境劣化。针对这一问题,构建载荷共享因子,并将载荷共享因子引入到传统马尔可夫模型中,建立基于载荷共享的并联可修复系统可靠性分析模型。在缺乏长期统计资料的情况下,可假定正常元件平均分担负载,进而开展可靠性评估工作。
(2)所建立的模型既适用于元件故障率相同又适用于元件故障率不同的并联可修复系统。当载荷共享因子取值为1时,文中模型退化为传统马尔可夫模型。
(3)算例结果表明,文中方法和传统方法求得的系统瞬态可用度变化趋势相同。对于3个算例,文中方法给出的稳态可用度分别为传统马尔可夫模型计算结果的99.82%、99.41%和97.35%;MTBF分别为传统马尔可夫模型计算结果的41.35%、52.61%和29.00%。综上,当考虑载荷共享时系统的稳态可用度减小幅度不大,而MTBF将大幅减小,因此利用传统马尔可夫模型给出的MTBF来衡量系统可靠性以及确定维修间隔需慎重。