

高空试车台(简称高空台)是对发动机整机和部件进行试验的关键设备,能模拟高空飞行条件和环境,对研制和改进航空发动机具有重要作用。对于高空台,空气起动系统是验证航空发动机起动性能并探索空中起动特性的关键设备,其控制性能直接决定了高空台相关验证试验的成败。该系统主要由高压气源、各类型阀门以及管道等构成[1]。相较于电起动或燃气涡轮起动,空气起动系统通过调节空气涡轮入口压力来实现起动机的旋转,进而利用传动装置将航空发动机带至起动状态[2]。该系统输出扭矩大、结构简单、工作稳定可靠。然而,在试验过程中,系统的工作部件多、阀门和管道结构耦合关联、环境和工况复杂[3],这些因素都对空气起动系统,尤其对其空气涡轮入口压力的调节产生较大干扰。因此,亟需研究和开发新型高空台空气起动系统的智能控制方法,以消除各种干扰因素的影响,并使其能够适应不同工况下的起动过程要求。
当前,在高空台空气起动系统控制领域,PID控制依旧是主流方法。例如,雷勇等[4]针对台架试验中空气起动系统存在的定常阶跃扰动,设计了一种动态前馈补偿和PID反馈组成的复合控制器,有效提高了空气起动系统的抗扰动特性。另外,高空台进气压力模拟系统与空气起动系统结构相似,相关控制方案的研究较多。朱美印等[5]针对高空台进气系统在全工作范围的精确控制问题,提出一种PI增益调度控制方法。赵涌等[6]提出一种复合控制技术,将PID与模糊控制相结合,构成兼具两者优点的压力模拟控制系统。钱秋朦等[7]基于自抗扰控制器,提出一种具有主动抗扰机制的进气压力控制方法,大幅提升了发动机过渡态试验中进气系统的调节品质。
高空台空气起动系统涉及部件多,系统参数复杂,基于模型的控制有时难以获得更好的控制效果。无模型自适应控制是一种无需建立过程模型的自适应控制方法[8],它利用系统输入输出信息建立等效线性化模型,并引入伪偏导数估计器实现参数自适应调节。在此基础上,无模型自适应迭代学习控制[9]无需高精度模型,每次迭代的控制输入都会在以往控制量的基础上根据跟踪误差来修正,以获得更好的性能。作为主要执行机构,阀门对系统输出起决定性作用。然而,阀门为典型大延迟环节,易产生超调振荡,如何避免延迟是控制系统必须解决的问题。本文采用Smith估计器来补偿阀门响应延迟对控制系统的影响[10]。
综上,本文针对现有高空台空气起动系统建模复杂、模型耦合性强、基于模型的控制方法适用性不足等缺点,提出一种基于Smith估计的高空台空气起动系统无模型自适应迭代学习控制方法。首先,利用输入输出数据,建立系统动态线性化模型;然后,根据系统模型设计无模型自适应迭代学习控制器。仅利用系统跟踪误差与控制信号输入,并通过迭代更新的方式不断修正控制量,达到完全跟踪期望信号的目的,而在控制器设计过程中无需系统模型参数。同时,利用Smith估计器可以有效补偿延迟时间对系统稳定性的影响。
1 空气起动系统建模
1.1 空气起动系统工作原理
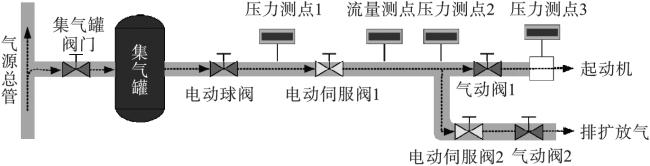
如图1 所示,空气起动系统各阀门包括集气罐阀门、电动球阀、电动伺服阀1、气动阀1、电动伺服阀2和气动阀2。其中电动伺服阀1为主路控制阀门,电动伺服阀2为旁路控制阀门,图中箭头方向为气流流通方向。系统工作原理如下:首先,电动球阀全关,集气罐阀门全开,待充满后,关闭集气罐阀门。然后,使电动球阀、气动阀1和气动阀2根据试验所需保持恒定开度。最后,通过改变主路和旁路阀门的开度调节压力测点3,以满足空气涡轮入口目标压力的指标。
1.2 主路/旁路控制阀建模
试验过程中,空气起动系统主路控制阀门和旁路控制阀门的动态特性直接决定系统性能。由于其余阀门在试验过程中保持特定开度,故可通过使用折合流量计算压力动态特性的方法。控制阀门是典型的节流元件,也是高空台空气起动系统的最终执行元件,主路/旁路控制阀门的工作原理与孔板类似,在控制阀门动态特性建模时将其等效为孔板。对于空气等可压缩介质,在绝热等熵条件下可推导出控制阀门的流量公式[11]如式(1) 所示
式中:p1 为阀前压力;pr 为阀后与阀前压力之比;ρ为阀前气体密度;k为气体绝热指数;A0 为调节阀等效截面积;u为流束收缩系数,它等于流束收缩最小截面积与节流孔面积之比;m为调节阀等效截面积与管道截面积之比;Qm 为质量流量。
令式(1) 中的第一个根号项为φ,称其为流量系数,则得到简化后的流量公式[12]
表1 阀门流量系数特性表 |
| α | pr | ||||
|---|---|---|---|---|---|
| 0 | 0.1 | 0.2 | ··· | 1 | |
| 0 | 0.350 00 | 0.226 00 | 0.138 00 | ··· | 0.002 83 |
| 0.1 | 0.342 00 | 0.219 00 | 0.136 00 | ··· | 0.002 80 |
| 0.2 | 0.327 00 | 0.215 00 | 0.132 00 | ··· | 0.002 70 |
| ··· | ··· | ··· | ··· | ··· | ··· |
| 0.9 | 0.061 00 | 0.052 00 | 0.046 00 | ··· | 0.000 66 |
| 1 | 0.000 00 | 0.000 00 | 0.000 00 | ··· | 0.000 00 |
1.3 管道容腔建模
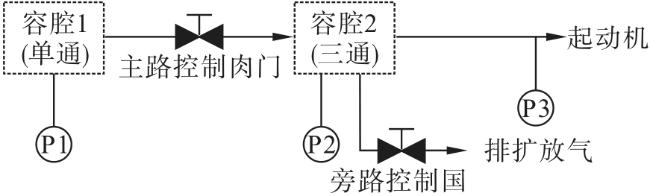
对于空气起动系统而言,其排气管路较为复杂,不同流路的气流会在双通、三通等结构内掺混,在管道出口流出。从结构角度分析,排气管路分别与集气罐、各类型阀门和空气起动机连接,各部件特性耦合关联复杂,排气管道动态特性直接影响整个空气起动系统性能。同时,集气罐在工作时,气体外排导致罐体压力下降,该特性也会对空气起动系统造成较大影响。因此,将集气罐和排气管道等效为容腔模型,分析其动态特性机理,建立部件级空气起动系统容腔模型,可对真实起动过程进行模拟。深入分析集气罐和各排气管道气体流通特性,为实际试验过程和平台改进改型提供可靠的借鉴和仿真验证。
式中:p和T分别表示管道内壁内气体压力和温度; 表示进气温度; 表示容腔等效容积; 和 分别表示容腔进气、排气流量; 和 分别表示进气、排气比定压热容; 表示气体常数。

2 Smith估计器设计
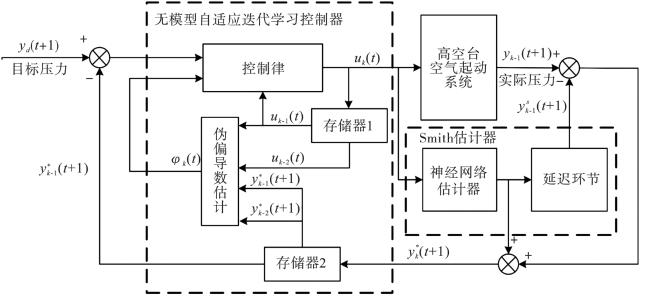
如图4 所示,系统运行时,在气源控制阀门和电动球阀全开的同时,无模型自适应迭代学习控制器开始对主路控制阀门进行调节,旁路控制阀保持50%开度恒定。为解决系统延迟导致控制器超调振荡的问题,加入Smith估计器[16],补偿延迟特性所带来的误差,如式(5) 所示
假设Smith估计器能完全估计系统参数,则根据式(5) 有
3 无模型自适应迭代学习控制器设计
3.1 高空台空气起动系统动态线性化
通过Smith估计器可得到高空台空气起动系统补偿输出 ,进而,可利用该输出量设计无模型自适应迭代学习控制器。高空台空气起动系统可通过如式(7) 所示的单输入单输出的非线性离散时间方程描述
式中: 分别为主路控制阀开度和Smith估计器补偿压力; 表示未知的非线性函数;ny 和nu 分别表示系统的未知阶数; 表示采样时刻; 表示迭代轮次。接着,给出以下3个假设:
假设1:对于式(7) 所描述的高空台空气起动系统,有界的期望输出信号 存在有界的可行控制输入信号,在此控制输入信号的作用下,系统输出等于期望输出。
假设2:非线性函数 关于高空台空气起动系统当前控制输入信号 的偏导数是连续的。
假设3:对于式(7) 所描述的高空台空气起动系统,对任意的t和k满足广义李普希兹条件
式中:
; 是常数,式(8) 成立表示有界的输入能量变化产生有界的输出能量变化。
若系统同时满足以上3个假设条件[18],则当 时,存在一个伪偏导数的向量,可建立紧格式线性化模型为
式中:t是采样时刻;k是迭代轮次; 表示伪偏导数。 ,表示相邻两轮迭代的控制差。同理,相邻两轮迭代的系统输出为 。
3.2 无模型自适应迭代学习控制算法设计
确定空气起动系统的控制输入准则函数,如式(10) 所示
式中的第1个平方项用于保证空气起动系统压力误差收敛,第2个平方项用于限制控制输入 的变化量, 用于调节对控制输入变化量 的限制程度。
将式(9) 带入式(10) 中,对 求偏导并令其为0,即 ,得到控制器如式(11) 所示
式中: 为步长序列; 。
3.3 伪偏导数估计算法设计
确定空气起动系统的伪偏导数估计准则函数,如式(12) 所示
式中: 、 分别为系统k-1、k-2轮迭代的空气涡轮进口实际压力; 是参数估计变化量的惩罚因子,通过适当调整 的数值,可以限制非线性系统的线性替代范围。
对式(12) 中 求偏导并令其等于0,即 ,得到如下伪偏导数估计算法
式中: 为步长系数; 。
为有效防止伪偏导数估计对实际系统的估计出现大幅偏离,设计复位算法
式中: 为充分小的正数; 是 的初值; 表示符号函数。
4 仿真分析
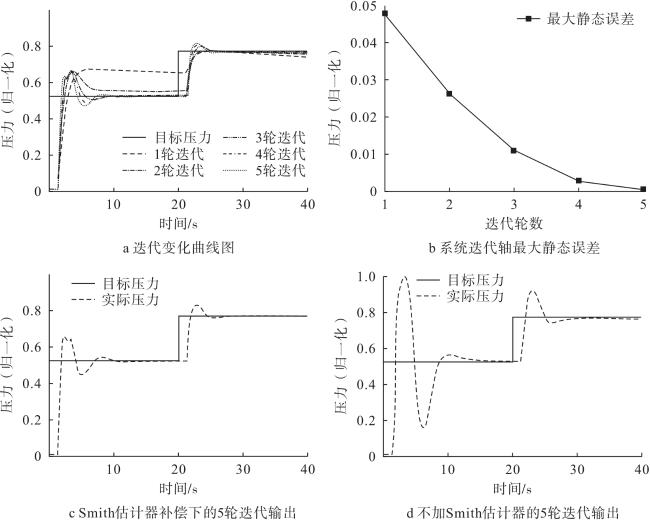
对基于Smith估计器的无模型自适应迭代学习控制设计进行仿真分析和有效性验证。压力数值通过归一化处理至(0~1)区间内。在仿真中,设计空气涡轮入口初始压力和温度分别为0(归一化)和288.15 K,气源初始压力和温度分别为1(归一化)和288.15 K。给定仿真时间区间为40 s,离散系统间隔设置为0.001 s,给定式(11) 中的 、 ,式(13) 中的 、 、 。给定期望压力信号为阶跃信号 ,其归一化后的表达式为
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5 结论
本文提出了一种基于Smith估计的空气起动系统无模型自适应迭代学习控制方法,实现了对空气起动系统的快速精确控制。从仿真结果可知,对于大延迟系统,Smith估计器能有效增强系统的动态调节性能,无模型自适应迭代学习能让系统在较短的时间内,实现系统的跟踪。在后续的研究中,会考虑加入旁路控制阀,实现高空台空气起动系统的双阀控制,进一步提高系统的调节性能。